

計算脳プロジェクト終了シンポジウム「ロボットを創って、人間を知る」(2009年1月22日、科学技術振興機構主催)研究報告、レクチャーから

より人間に近いヒト型ロボットを開発することで脳の働きを知るという新しいタイプの融合分野の研究開発を5年間続けてきた。
そもそも脳の機能が本当に分かっていれば、それをコンピュータやロボットに移し替えるのは原理的には難しくないはずだ。ロボットやコンピュータは人間に比べると機能は劣っている。滑らかに歩く、ものを上手に扱うといったことができない。ロボットや人工知能の研究がわれわれの期待したほどに進まなかったということで、それは脳の機能が分かっていないことの裏返しでもある。
では脳の機能を理解するにはどうしたらよいか。われわれの基本的な考えは、脳を創ることによって脳を知るということである。これまでは物と場所の研究に重点がおかれていたので、脳の中の情報処理の再現ということに目標を立てた。脳の中でどういうふうに問題が解かれているかにこだわる研究だ。したがって、これまでの脳研究とは異なる。作ってみて初めて働きが分かるという考え方だ。しかし、脳を作ってみても視覚や運動の機能は分からないので、どうしても体を作ることが必要となる。体を作るためにわれわれが使える技術はヒト型ロボットだろうと考えた。
こうしたわれわれの方法を計算論的神経科学と呼ぶ。脳の機能を、その機能を脳と同じ方法で実現できる計算機のプログラムあるいは人工的な機械を作れる程度に、深く本質的に理解することを目指すアプローチだ。
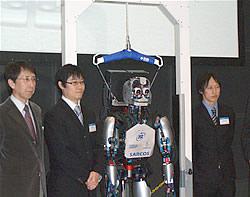
われわれが今回、米カーネギーメロン大学と共同でつくったヒューマノイドロボットは、身長155センチ、体重85キロと等身大で、目の動きを含め51個もの豊富な関節を持ち人間にかなり近い範囲の動きができる。これまで世のなかに出ているロボットは電動モータを使っているため力が弱い。体全体を動かそうとすると減速器を組み込まないと大きなパワーが出なかった。モータの回転を落とすには歯車が必要だったため、体がどうしても硬くなってしまう。ぶつかったりすると相手も自分も傷つくといった弱点があった。
これに対し、この等身大ロボットは主要な関節に油圧駆動を使うことで人間と同じように力をダイレクトに制御できる。関節ごとに独立に力、位置を制御できる人間並みの柔軟さを持つ世界初のヒューマノイドロボットだ。視聴覚、前庭、力覚など豊富なセンサと、強力な演算機能も持つ。この結果、人間と安全かつしなやかにインタラクションでき、力を細かく制御できるので、人間と同じように、体のどの部分に外力が加わっても、力を受け流しながらバランスを取れる。急にバランス崩されたようなときも足を踏み出しながら転倒を避けるといった能力も備えている。人間が投げるボールを見て、コースを予測して、全身を使ってバットを振ることもできる。
もう一つの成果は、自分の体のようにこのロボットを操作することで、ロボットに運動を教える方法を開発したことだ。ロボットが人間の動きをまね、人間はその動きを見ながら操作するという「双方向見まね」によって、手のひらで二つの球の位置を入れ替えたり、バランスを取りながら物をつかんだりする技能をロボットに教えることができる。
3つ目の成果は、米デューク大学との共同研究で、サルの脳活動から歩行パターンを直接制御するブレイン・マシン・インターフェースによりロボットが地面に足を着いて歩行するのに成功したことだ。ウォーキングマシーン上を歩かせたサルの運動野から数百の神経細胞の活動を読み出し、生物の歩行を参考にした制御手法を用いて開発された中枢パターン生成器に入力、サルの歩行パターンと同期した歩行制御をヒューマノイドロボットで実現した。
これらの成果により、ロボットを用いたブレイン・マシン・インターフェース研究の新たな一歩を踏み出せたと考えている。今回完成したヒューマノイドロボットと併せて、今後は脳活動によって制御されるパワースーツ型ロボットを用いて、さまざまな信号レベルでロボットから脳へフィードバックする高度な機能を備えたブレイン・マシン・インターフェース研究を進める予定だ。
(かわと みつお)
川人光男(かわと みつお)氏のプロフィール
1976年東京大学理学部物理学科卒、81年大阪大学大学院基礎工学研究科博士課程修了(工学博士)、大阪大学基礎工学部助手、講師を経て88年エイ・ティ・アール視聴覚機構研究所主任研究員、92年同人間情報通信研究所第3研究室長、2003年から現職。04年から国際電気通信基礎研究所ATRフェローにも。04年科学技術振興機構の戦略的創造研究推進事業ICORP計算脳プロジェクト研究総括、08年科学技術振興機構さきがけ「脳情報の解読と制御」領域研究総括、文部科学省「脳科学研究戦略推進プログラム」”ブレイン・マシン・インターフェースの開発”中核拠点代表研究者も。著書に「脳の計算理論」(産業図書)、「脳の仕組み」(読売科学選書)など。