

ネコがてくてくと安定して歩く「反射」の仕組みを、神経や筋肉の特性を再現するネコ型ロボットを開発して明らかにした、と大阪大学の研究グループが発表した。動物愛護の観点から実験に制約もある中、ロボットを活用して神経科学の研究をするニューロロボティクス分野の一環。より動物に近いロボットを実現するロボット工学の観点からも意義があるという。
反射は、ヒトなどの動物が熱い物に触れると瞬間的に手を引っ込めるなど、刺激を受けて無意識に起こる反応の仕組みだ。動物が歩くためには脳や脊髄の複雑な回路ではなく、この反射回路をうまく使って動きが生まれていることが、近年の研究で分かってきた。それに関わるとみられる個々の神経回路は過去の研究で分かっていても、歩行を実現するための全体的な配線は未解明という。生体を動かす神経の仕組みを調べることには限界がある上に、動物愛護のため動物実験が厳しく管理、制限されるようになっている。
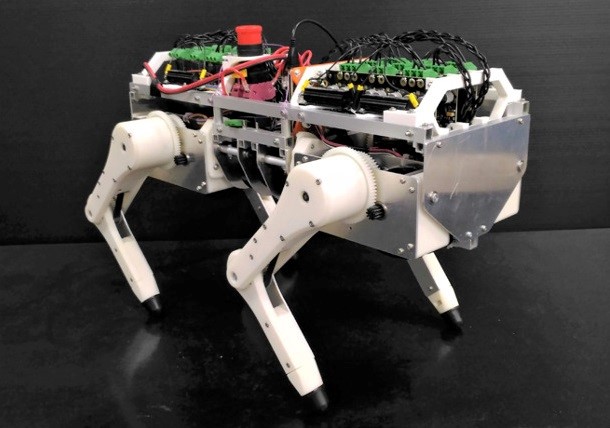
そこで研究グループは、動物を使わずに実験ができるよう、動物の神経や筋肉の特性を再現して歩く四つ足のネコ型ロボットを開発した。全長47センチ、重さ7.6キロ。力強くかつ柔らかい動きができるよう、高出力でギアを多く使わないモーターを採用。コンピューターが計算した筋肉の特性を再現できるようにした。
完成したロボットで実験した結果、膝から腰に伸びる回路と、逆に腰から膝に伸びる回路がクロスして機能しているとみられることを発見した。過去の研究を参考に、この全体的な仕組みをプログラムで再現すると安定して歩いた。ネコが地面を踏みしめて膝の筋肉が力を受けると腰が後ろに動き、腰の筋肉が力を受けると膝が伸びるという、自動連動があって歩行が実現しているという。また、この回路の電気信号をゼロにして働かなくしたところ、歩行のリズムが崩れてしまった。
さらに、昔行われた動物実験をこのロボットで再現できるかを調べるため、この回路に電気刺激を与えたところ、同じように足が地面から上がらない現象が起きた。ロボットが生体の回路を再現できていることがうかがえる結果となった。
研究グループは、ロボットは生体とは異なるものの、発見した仕組みがネコの歩行を支える有力候補だとみている。こうしたロボットをさらに開発して実験動物の代わりをさせれば、幅広い条件で動物の仕組みを調べられるとしている。動物の構造に近く、効率よくしなやかに動くロボットの開発を進めることで、生物学とロボット工学双方の発展につながるという。
研究グループの大阪大学大学院工学研究科の増田容一助教(制御工学)は「動物を模倣するロボットはいろいろ作られてきたが、ようやく体の仕組みを調べることに役立つ段階にきている。モーターなどの部品が安価になった要因も大きい。複雑な仕組みを再現し尽くす道のりは遠いが、ロボット工学と生物学はどんどん近づき融合していくだろう」と述べている。
成果は専門誌「フロンティアズ・イン・ニューロロボティクス」に日本時間4月8日に掲載され、大阪大学が同23日に発表した。

関連リンク
- 大阪大学プレスリリース「歩くネコをロボットで再現、反射回路を新発見」
- ユーチューブ「Robotic Cat that Substitute for Experimental Animals」