

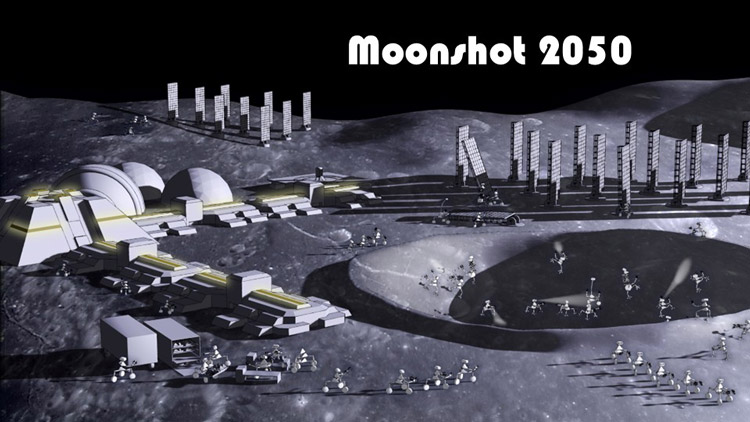
月面でロボットがAI(人工知能)を生かして変形しながら、2050年までに人間が住める都市を造る――。まるでSFの世界のような壮大な目標を掲げ、東北大学などの研究グループがロボットの開発に汗を流している。政府の大型研究開発プログラム「ムーンショット型研究開発制度」の一環で、試作機の実験を報道陣に初公開した。
部品のまま月面へ、作業に応じ組み替わる
「危険な場所で働くのは全部、ロボット。宇宙飛行士は安全な場所にいて、場が整ってから行きます」
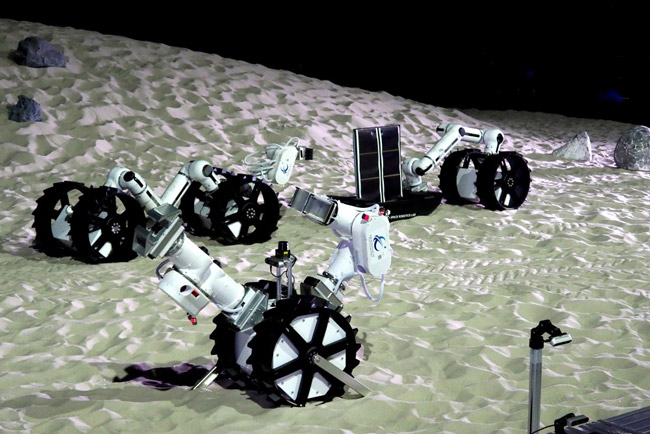
ロボットによる月面都市建設の構想を語るのは、東北大学大学院工学研究科の吉田和哉教授だ。相模原市内の宇宙航空研究開発機構(JAXA)にある、月面を再現した実験施設に3月12日、詰めかけた記者たちに「月面未来都市」「変幻自在のロボット」などと、冒頭からパワーワードを投げかけた上、「ムーンボット」と名付けた実験用ロボットが作業する様子を、次々と実演してみせた。吉田教授は月面ロボットの研究に長年打ち込むなど、宇宙分野の記者の間でお馴染みの存在だが、この日はいつにも増して語りが滑らかだった。
このロボットの何よりの特徴は、月面で組み立てること。地球からロケットで月にモノを運ぶのはコストがかさむだけに、せっかく運んだモノは有効に活用したい。そこで完成品のロボットではなく、車輪や腕といった、ひとまとまりの機能を持った部品「モジュール」群を月面に運び、目的に応じて組み立てる。ロボットたちは特定の作業をした後、次の作業内容に応じ、AIを使って自律して組み替わって変形したり、月面の資源を使い補修を受けたりする。
吉田教授は「モジュールにすれば(ロケットに搭載する際の)収納の効率が上がり、しかも現地で形を変えて多目的に使えます。月面で組み立てたり、変形して自己再生したりと、新しいチャレンジをします」と力説する。月面にはこのロボットを組み立てるロボットが必要で、今回の実験ではまず、モジュール同士を組み合わせる作業などを示した。
発電施設に居住棟…建設こなす
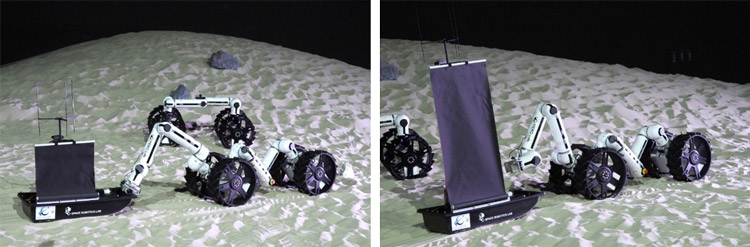
組み上がったロボットは資材の運搬や土木、構造物の展開、組み立てといった作業を行う。実験で目を引いたものの一つが、太陽電池パネルの設置だ。ムーンボットがパネルの載った台座を目的地まで引っ張って運ぶと、巻き取られていたパネルが展開した。将来的には、パネルに展開用の固有のモーターを搭載せず、ロボットが持つモーターの動力を伝える形で、パネルを展開できるようにするという。
月面で人間が仕事をしたり、暮らしたりする居住棟の建設法も、実にユニークだ。折り畳まれた膜状の構造物の壁の中に、風船のように空気を送り込んで膨張させる。傍らでは、付き添うようにロボットがたたずみ、カメラで膨張の様子を見守り、膨らみが足りない部分を検知して完成まで導く。
膨らませる居住棟の先例としては、米企業が2016年に国際宇宙ステーション(ISS)に設置した「ビーム」が知られる。吉田教授のグループに参画する東京理科大学創域理工学部の木村真一教授は「ビームはインフレータブル(膨らませる方法)を世に知らしめる効果が大きかったが、絶対に破れないようにと、膜がかなり分厚くなってしまいました。彼らはビームをインフレータブルではなく、エキスパンダブル(拡張させる方法)と呼びました」と話す。
これに対し木村教授は、風船を多数に分割した“マルチセル”構造により、少数のセルに穴が開いても他のセルがカバーする仕組みを提唱する。「分散的に耐久度を上げることで、膜を軟らかくできます」と木村教授は言う。

ロボットが姿勢を保って効率よく動いたり、段差を乗り越えたりする能力も人間が細かく教えず、ロボットがAIを活用して自律して学んでいけるよう、研究を進めている。
月極域開発で「日本の技術示す」
有人宇宙活動は、高度400キロを周回する国際宇宙ステーション(ISS)のような地球低軌道に加え、地球から38万キロ離れた月への展開が見込まれている。米国は大規模な国際探査として「アルテミス計画」を主導し、1972年に終了したアポロ計画以来となる有人月面着陸を、現時点で2027年半ばに実現するとしている。日米政府は同計画で、日本人2人が月面に着陸することで合意済みだ。
吉田教授らのロボットは、このアルテミス計画での活躍を視野に入れ、最初の現場として月面の極域を目指している。極域のクレーターの陰には、太陽光が全く当たらない部分があり、水の氷が眠っているとされる。これを採取して飛行士の飲料水として、また太陽電池で水素と酸素に電気分解することで燃料として、使えるとの期待があり、月面開発の意義の一つとして広く認識されている。
「極域開発の国際競争に名乗りを挙げ、『日本にこういう技術がある』と、ロボット工学の最先端でプレゼンス(存在感)を示します。やはり一番は極域だと、強い信念を持って進めています」と吉田教授。月面に資源として利用できる十分な量の水があるのか、科学により慎重に検証を進めつつ、世界に先駆ける技術を磨いていく必要があるだろう。
吉田教授は「一番分かりやすいターゲットとして月の極域を目指すが当然、限定はしません。温度環境などの厳しい極域で使える技術は、月面の他の場所や火星にも、十分に適用できると思います」と説明。地球上の災害対応などにも応用できるという。
月の地下空洞で働くロボットも

ムーンショット型研究開発制度は「日本発の破壊的イノベーションの創出を目指し、従来の延長にない、より大胆な発想に基づく挑戦的な研究開発を、司令塔となる総合科学技術・イノベーション会議の下、関係省庁が一体となって推進する新たな制度」として、2018年に創設された。10の目標のうち、科学技術振興機構(JST)が7つを担当。このうち目標3「2050年までに、AIとロボットの共進化により、自ら学習・行動し人と共生するロボットを実現」の課題の一つとして、吉田教授がプロジェクトマネージャーを務める「月面探査/拠点構築のための自己再生型AIロボット」が22年度に採択された。東北大学のほか大阪工業大学、京都大学、東京理科大学、産業技術総合研究所が参画している。
なお、実験はJAXAの施設を借りて行っているが、活動の主体はJAXAではない。ムーンショットの名称に「ムーン(月)」を含み、今回公開されたのもたまたま月面がテーマの課題だが、この制度で取り組まれている課題は健康や気象、資源など多分野にわたっている。
13日に開幕する大阪・関西万博では7月22日~9月15日に、ムーンショットが目指す未来社会をテーマとした体験型展示「ムーンショットパーク~見て!触れて!感じる!新・未来~」が企画されている。期間中の8月6~11日には「ロボットがつくる月面世界で、何がしたい?」と題し、今回の試作機を進化させたモデルを展示するという。
ムーンショット目標3では月面に関連し、吉田教授のグループとは別に、中央大学理工学部の國井康晴教授らのグループが、溶岩が流れ出した後にできる地下空洞「溶岩チューブ」の中で、探査や居住環境の構築などをするロボットの開発を進めている。
人間とロボットの関係性…「自律性」キーワードに
月面での、人間とロボットの良い関係はどんなものか。吉田教授は思いを次のように語った。
「今、宇宙飛行士は科学的、知的な生産活動をしたくてISSに行っているのに、現実にはロジスティクス(物品の移動や保管の作業)などにもかなり時間を取られています。そういう作業は、できるだけロボットに任せるべきです」
「ロボットに100%丸投げするのではありません。『次に何をすべきだ』といったマクロなコマンドは人間が与えるが、それを解釈して動き方を考えるところからは、ロボットが自律的にやるべきです。また、月面か地上に人間がいるにせよ現場監督であり、作業するのは完全にロボット。人間は宇宙服を着て外に出て危険な作業をするのではなく、科学観測などの知的で頭脳を使う仕事を、安全な場所でやるべきです」
「人間と機械がオートノミー(自律性)の度合いを分け合う『シェアード・オートノミー』とか、基本的に機械が自律して動くが、おかしなことがあれば人間が介入する『スーパーバイズト・オートノミー』という考え方があります。これは私たちの(月面ロボットの)課題に限らず、AI化した機械と人間との付き合い方の問題。全体をマネージするのは人間で、その中で機械が自律的にいろいろなことをするのが、一番好ましい、人間と機械の関係だと思います」

月面ロボットの開発や都市建造は、それ自体がワクワクする話である一方、前述の万博企画の副題にもある「月面で何がしたい」は、深い問いかけだ。現実味が増すにつれ、関心と議論がより広がっていくだろう。さらに言えば「それで、人間はどうなりたい」も大切ではないか。人間はロボットやAIをはじめとする便利な技術開発の果実をもぎ取りつつ、決してモノグサになってはいけない。私たちは月面でもどこでも、技術を上手に使い、より知的好奇心を高めて“脳みそに汗をかく”存在であり続けたいものだ。
関連リンク
- 東北大学「月面探査/拠点構築のための自己再生型AIロボット」
- 科学技術振興機構(JST)「ムーンショット型研究開発事業」
- 内閣府大阪・関西万博展示情報「ムーンショットパーク~見て!触れて!感じる!新・未来~」