

炎の中のとがった物体もつかむことができる数珠状のロボットハンドを東北大学の研究グループがこのほど開発した。消防隊員などが近づけない灼熱(しゃくねつ)の火災現場や炎上する災害現場での活用が期待できるという。
新たな災害用ロボットハンドを開発したのは東北大学大学院情報科学研究科の多田隈建二郎准教授や田所諭教授と同研究科の博士課程の学生ら。これまでの災害用ロボットハンドは主に袋型で物体を包み込むようにつかむ形状。素材もゴムだったために燃えやすかった。このため炎上する現場でとがった物体をつかむと、捕捉に一番大切な手の部分にあたる袋が破けてしまったり、長時間使うと燃えやすいという課題があった。また、炎上していない現場でも、がれきの中のガラスの破片や鉄筋が露出した鉄筋コンクリートなど、袋が破れやすい物はつかみにくかった。
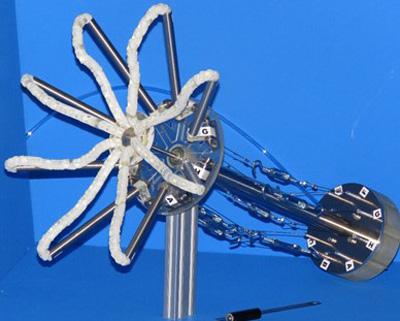
こうした課題を解決するするため研究グループは、物体をつかむ手の指となる部分を柔軟に曲がる数珠状の構造にし、この数珠の指を放射状に配置する形状(1次元ジャミング機構)にした。数珠の素材には耐熱性、耐久性が高い金属を使用。軽量にしたため、既に開発済みの災害用ヘビ型ロボットや脚型ロボットなどへの搭載が可能という。研究グループは、灼熱の環境下で高温の物体や破損したバルブ、割れたガラス類、飛び出た釘類、鉄条網といった、これまでは捕捉が難しかった物体もつかむことができ、火災、災害現場のほか、さまざまな形状をした物品を扱う生産現場での活用も可能としている。
今回開発された新型ロボットハンドは11月2日に福島県南相馬市内で開かれる「福島ロボットテストフィールド」評価会でデモンストレーションが行われる(参加申し込み終了)。この研究は、内閣府の「革新的研究開発推進プログラム(ImPACT)」の一環として進められた。


関連リンク
