

AI(人工知能)がトマトの受粉に最適な時期の花を見つけて、ドローンで受粉する「人の手を介さない農業」の研究に、日本工業大学の平栗健史教授(無線通信工学・農業制御学)が取り組んでいる。農家の人手不足、高齢化や気候変動といった課題にICTなどを駆使し、生産効率を高める未来のスマート農業の在り方を探る。「これまで受け継がれてきた『農家の勘』を先端技術がうまくカバーする方法を確立していきたい」と意気込む。
シイタケがきっかけ おいしい野菜を届けたい
同大基幹工学部電気電子通信工学科の平栗教授はもともと、シイタケが好きで、研究室にはシイタケのグッズが飾られているほど。シイタケをより早く、大量に栽培できないかと、雷など大きな音を聴かせたり、原木を加工したりするなど工夫を重ねた。研究室で栽培するシイタケは風味が強く、肉厚で軸に弾力があっておいしい。今回、「天候に左右されない室内で、他の野菜や果物も作れないだろうか」と新たな研究を始めた。
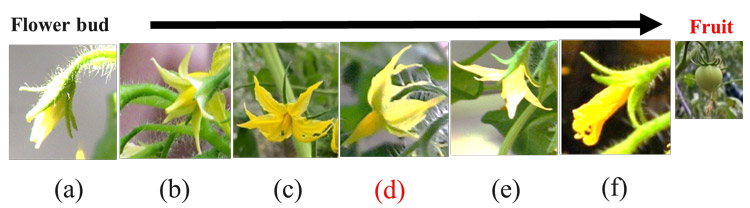
最初に目をつけたのは自家受粉できるトマトだった。トマトの受粉には蜂などの虫が必要だが、部屋の中に野生の虫を生息させるのは難しい。そこで、ドローンを虫に見立てて受粉させ、トマトの実をつけることを考えた。いざ研究を始めようとトマト農家を訪ねたところ、「受粉の時期はこれくらい花が咲いたとき」と言われた。連日、農家へ足を運んだが、「これくらい」という『勘』に頼っていて、明確な基準がないことが分かった。
平栗教授は花弁の状態などから「これくらい」が受粉に最適と伝授されたトマトの花の画像をカメラで撮影。ネットでも同様の花の画像を検索し、AIにCNN(畳み込みニューラルネットワーク)という深層学習を利用して覚えさせた。撮影時にはあえてブレた画像や画素が粗い写真も撮り、学習度を高めた。

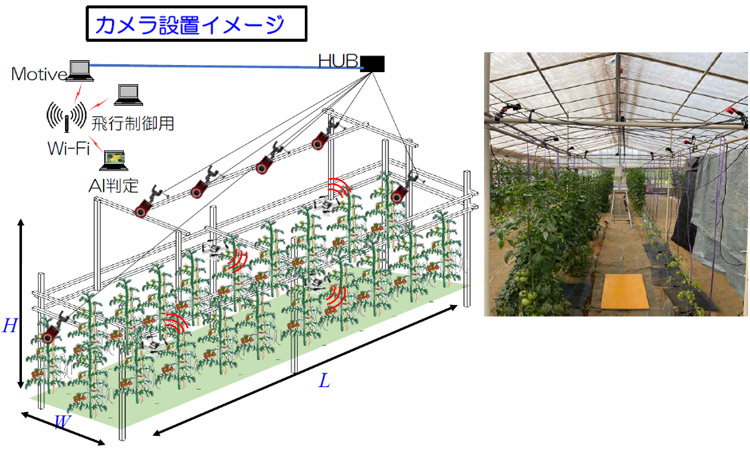
こうして学習したAI搭載のカメラで、まず手作業で花を撮影してAIが「受粉可能」と判断したものに受粉させたところ、70%以上の確率で実がなることが分かった。判定実用化のめどが立ったため、次にドローンによる撮影と判定の仕組み作りに取り組んだ。AI搭載のカメラは大型のためドローンも大きくする必要があり、機動的な撮影が難しくなる。平栗教授は撮影専用の小型カメラをドローンに搭載。ドローンで撮影した画像データはWi-Fiを使いパソコンに送信し、パソコンに搭載したAIが画像を判定するようにした。
枝葉に引っかからないドローンの開発
実際に農場でトマトの花を認識させるため、2020年から神奈川県平塚市の県農業技術センターのビニールハウスでドローンを飛ばしてみた。飛ばし方はランダムに直線と曲線を組み合わせたものと、Z字を描くような2種類。これらの軌道は上に高く伸びるトマトの葉や枝にドローンがぶつかって墜落するのを避けることと、葉が重なった部分に隠れた花を見逃さないために採用したという。
飛行したドローンの位置情報を把握するために、ハウス内に大型カメラを付けた。カメラの台数は測量の方法に着想を得て算出した。つまり、各ドローンから大型カメラがそれぞれ常に3台以上見えるように設置すれば、葉の陰や枝の分岐部でもドローンの位置情報を認識できる。大型カメラもWi-Fiを使ってパソコンに接続し、ドローンの位置と受粉に最適な花の位置を照合してリスト化。数百株を対象に、まずは手で受粉させて2週間ごとに実ができているかどうかを確認した。
日本工業大学は埼玉県でも茨城県寄りの宮代町に位置しており、そこから神奈川県平塚市のビニールハウスまで車で片道約2時間かけて通う。平栗教授は「この研究で一番きつかったのは技術の側面よりもこの距離を往復した日々。暑いハウス内で作業を続け、農業って大変だと身にしみて分かったからこそ、なんとしても研究を成功させたかった」と振り返る。

虫代わりになる受粉のためのドローン開発
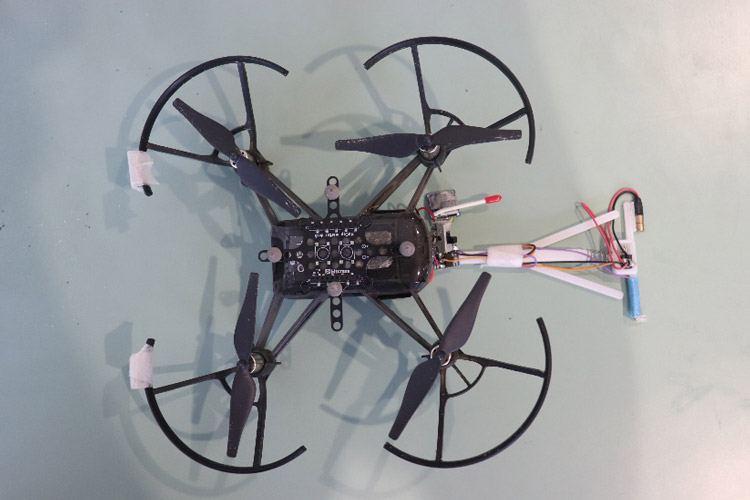
画像撮影と位置情報を把握できたので、いよいよ受粉のための別のドローンを作ることに着手した。最初に受粉用の棒を載せたドローンを飛ばしてみたところ、正確に捉えられる花もあれば、花から数センチメートル外し、通り過ぎる事象が起きることが分かった。どのくらい誤差が生じているか確認すると、2センチメートル以内が8割を占めていた。
これを解消するため、受粉部分を1本の棒にするのではなく、誤差を吸収するよう、T字にしてみた。だが、この形ではT字の端が枝に引っかかって戻れなくなるミスが生じた。最終的には3Dプリンターで、野球のグラウンドを整備するトンボ掛けの「トンボ」のような形に改造。その内部に花を通り過ぎてしまった場合の空振りを防ぐためのバネと赤外線を搭載し、花弁の圧を感知しないときは戻るという動作を組み込んだ。
この「トンボ」状の受粉部分をドローンに載せて飛ばすと、位置を捉えて花に当たって正確に受粉し、墜落することもなくなった。これらの方法では実がなる確率もこれまでの農業の手法より1割上がり、生産性の向上にもつながったことが確認できたという。トンボがドローン本体からあえてはみ出るように長めに作ったため、枝や葉に接触して墜落することもない。
平栗教授は「トマト同様に他の自家受粉の野菜類にも応用でき、後継者不足に悩む農家の力になれると思う。問題は他家受粉の果物だ。いま、梨にチャレンジしているところで、複雑な形状の樹木になるとドローンの飛行のハードルがもう一段上がる。更なる研究を進めたい」と話す。
平栗教授は産学連携で大学内の敷地に大型ビニールハウスを建て、人の手を介さず機械だけで農作物の収穫まで行う完全なスマート農業の方法を確立する研究を始めている。今回分かったトマトの最適な受粉期に関する論文を書き、農学の博士号取得を目指しているところだという。研究は農林水産省のイノベーション創出強化研究推進事業の助成を受けて実施した。
ドローン、AI、Wi-Fiとここ数年で普及した科学技術が、数百年続く農業の課題を解決していけるワクワクする未来を垣間見た。次世代の食を守るために、科学のタネが芽吹くような地道な研究が求められている。