


はじめに、試練の連続
(独)海洋研究開発機構(JAMSTEC:Japan Agency for Marine Science and Technology)は国際科学掘削プログラム(IODP:International Ocean Discovery Program、前Integrated Ocean Drilling Program)が目標とする科学計画への貢献を目的に地球深部探査船「ちきゅう」(図1参照)を開発した。「ちきゅう」は建造当時では最新鋭・最大級である第五世代大水深ライザー掘削船として2005年7月にJAMSECへ引き渡され、その後、実海域試験、慣熟訓練を経て、2007年9月よりIODPの推進する科学掘削航海を開始した [1][2] 。

背面の富士山がエールをおくってくれているようだ 。
「ちきゅう」は今までに、(1)南海トラフ地震発生帯掘削計画(Nankai Trough Seisomogenic Zone Experiment:NanTroSEIZE) (2)東北地方太平洋沖地震調査掘削計画(Japan Trench Fast Drilling:JFAST) (3)沖縄トラフ熱水生命圏掘削計画(DEEP HOT BIOSPHERE) (4)下北沖石炭層地下生命圏掘削計画(Deep Coalbed Biosphere off Shimokita)を実施してきた(図2参照)。いずれの掘削調査航海でもそれぞれ輝かしい科学成果を収めてきたが、その裏では、今までの石油掘削や科学掘削の分野で経験したことのない試練の連続だった。例えば、強海流、悪海気象、大水深、大深度といった非常に厳しい環境条件で、技術的、運用的課題を乗り越えるため多大な努力が費やされてきた。この解説では、IODPの新しい科学ミッションへ挑戦するために「ちきゅう」が今までに取り組んできた最先端技術のいくつかについてご紹介したい。
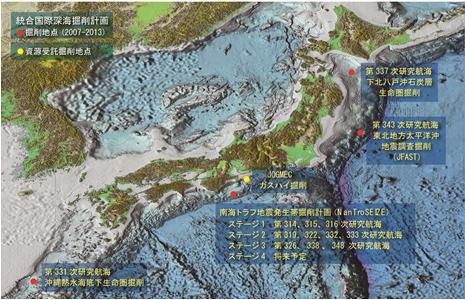
北から下北沖、日本海溝宮城沖、南海トラフ紀伊沖、沖縄トラフ伊平屋。
風・波・流れとの戦い
南海トラフのNanTroSEIZEは、科学史上初めて、巨大地震が幾度なく発生してきた海底下の地震断層を目指して掘削し、地震発生の鍵となる岩石試料を採取するだけでなく、現場でのデータ観測を試みる科学計画である。掘削海域は紀伊半島の100㎞ほど沖に位置する(図3参照)。この海域は、台湾東岸を北上し、日本の太平洋岸を通過する強海流、黒潮が支配する海域でもある。黒潮の表層流速は平均3.5ノット、最大流速約7ノット、さらに、強い流れは深層部にまで及ぶことがあり、進路の予測も非常に困難である(図4参照)。黒潮以外にも、紀伊半島沖には7月〜10月に大型の台風が発達しながら通過するし、冬期には寒冷前線の通過で強風が急激に方向を転換する海気象変化の激しい海域でもある。精度よい定点保持が不可欠な「ちきゅう」にとって、NanTroSEIZE海域はまさに苦しみの三重点といえる。稼働率を確保しつつ安全な運用計画を策定するためには、緊急待避を含めた様々な運用シナリオに対して、遭遇しうるリスクをすべて勘案した詳細なライザー解析が重要となる [5] 。また、パイプが強海流下に置かれると流体抵抗によってパイプが大きくたわむ。パイプ背面に発生する渦列によってパイプが振動し(VIV:Vortex Induced Vibration、渦励振、図5に実海域計測データの解析結果を示す)、これがパイプの固有振動数に合致したときに振動が激しくなり、一挙に疲労破壊に至ることがある。その対策として、翼型形状をしたカバーでライザーパイプを覆うフェアリング(図6参照)[7]、ライザーパイプの挙動を計測し、リアルタイムで疲労を推定するシステム(RFMS:Riser Fatigue Monitoring System、ライザー疲労モニタリングシステム、図7、8参照)を新しく開発し、安全で効率的なライザー運用に役立てている[8] 。このほか、ドリルパイプのVIV抑制対策としては、より簡便な方法(複数本のロープを沿わせることで渦列を乱す)を開発し、ライザーレス孔への長期孔内観測システム設置を成功することができた [6] 。
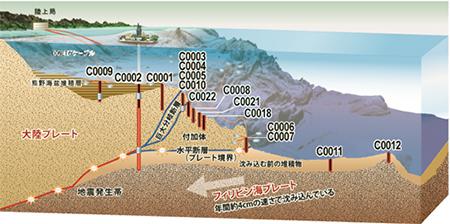
紀伊半島の沖合約100kmに位置する。
プレート境界から分岐する地震断層を掘削し、長期孔内観測システムを設置する計画。
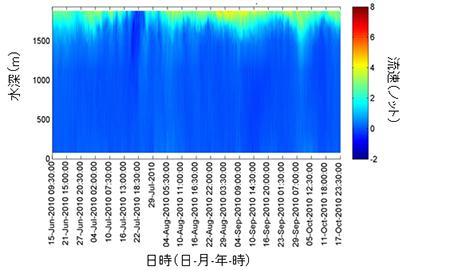
表層は黄色からオレンジ色(4ノット〜5ノット)がみられ、強い流れが深層まで持続することを特徴としている。
進路の予測は難しい。
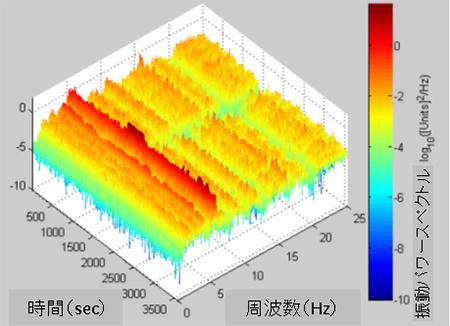
約7HzあたりでVIV共振モードがみられる。

ライザーフェアリングは翼型形状をしており、流向にあわせて回転する。
全体は3部品から構成され、取付には一セット約6分要する。
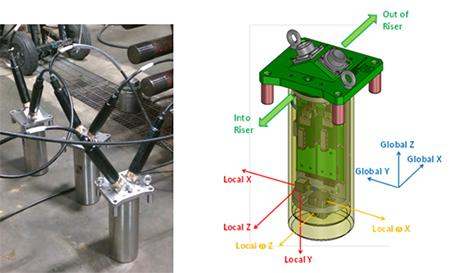
内部には三軸加速時計、二軸角速度計を搭載し、全7基がライザーパイプの所定位置に取り付けられ、光ファイバーケーブルを介してデータを船上に伝送する。
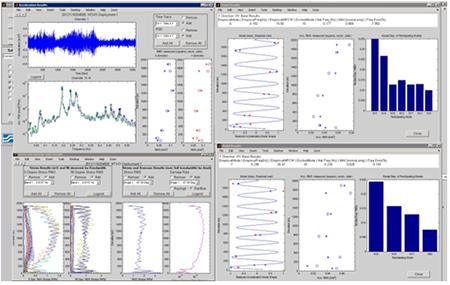
左上は加速度データの時系列表示および周波数解析表示。
右列は事前のモード解析データベースとの相関表示。左下は応力および疲労の鉛直プロファイル表示。
大水深・大深度への挑戦
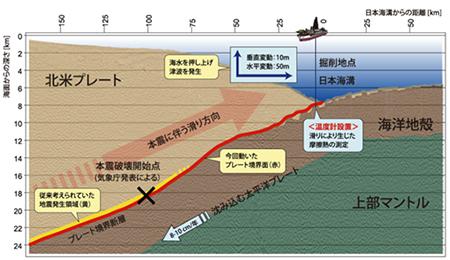
JFAST掘削海域は宮城県・牡鹿半島沖、日本海溝の海溝軸の西側、水深6,910mに位置する。その科学目的は、2011年3月11日の東日本太平洋沖地震で滑った断層位置(海底下約850m)まで掘削し(図9参照)、(1))断層域の孔内検層(2))断層物質の回収(3))断層に蓄積された摩擦熱把握のための長期孔内観測システム設置−の3テーマであった。過去の大水深掘削の記録では、Glomar Challengerが1978年にマリアナ海溝の水深7,034mで掘削に成功しているが、この航海中に掘削できたのはわずか海底下わずか15.5mに過ぎなかった。また、石油掘削では水深7,000mでオペレーションすることはない。これに対してJFAST航海では約8,000m長のドリルパイプを用いる必要があり、科学・技術の両面において今までの記録を塗り替える大きな挑戦だった。応力的に最も厳しくなるドリルパイプ上部では自重、船体動揺による変動荷重、孔内に拘束された場合の引き抜き力、船体動揺や潮流による曲げ荷重を複合した応力を考慮しなければならない。さらに、実管を用いた疲労強度計測を実施(図10参照)、これらをベースに運用限界条件を確定し [9][10]、JFASTの非常にチャレンジングな掘削計画を無事に遂行することができた。

素材疲労強度と実管疲労強度の評価を実施し、実掘削におけるドリルパイプの
疲労解析手法を確立した。
科学の窓 ? 地球の内部をのぞく
掘削孔にセンサーを設置することができれば、地球の内部をのぞくことができる貴重な科学の窓になる。しかしながら、高圧、高温といった厳しい環境に加えて崩壊のリスクが高く、狭い孔内空間に高精度でとても繊細なセンサーを設置することは容易ではない。
JAMSTECはひずみ計、広帯域地震計をはじめとする7種類のセンサーからなる、これまでにない長期孔内観測システムを開発し、2010年12月、南海トラフのNanTroSEIZE C0002ライザーレス孔(水深1937.5m、掘削深度980m)への設置に成功した[11]。地震や地殻変動、断層帯中の流体挙動など、多角的なデータをひとつの孔内の各所で同時に観測できる長期孔内観測システムの設置は世界初の快挙である。
長期孔内観測システムの構成を図11に示す。2012年1月にはDONET(Dense Oceanfloor Network system for Earthquakes and Tsunamis)海底ケーブルと接続され、現在はリアルタイムでの孔内観測が行われている。
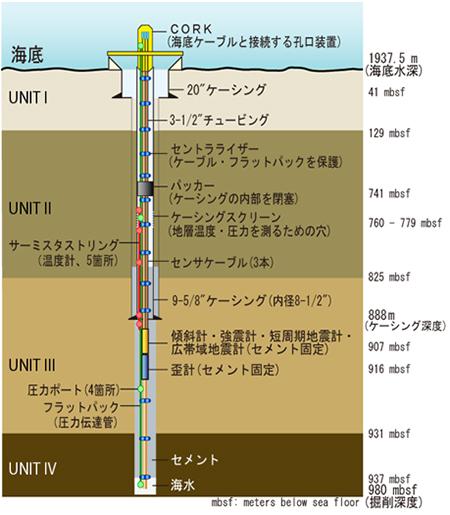
四つに分類される地層を掘削し、ユニット2と4では地層流体挙動を、ユニット3では地震・地殻変動をそれぞれモニタリングする。
東北地方太平洋沖のJFASTの長期孔内観測システムでは、7,000mにおよぶ大水深であること、準備および航海期間に制約があることを考慮して、極力シンプルな構成で信頼性を高めた。また、設置時の衝撃、振動など破損リスクを考慮して十分に頑強であることが要求され、自己記録型の高精度温度計測ロガー(MTL:Miniature Temperature Logger、一部、圧力同時計測)55基をVectran製高強度ロープに固定して4-1/2”ケーシング(外径約114mm)内に吊り下げた。これをROVで孔内から引き上げ回収可能とするシステムを作り、2012年7月、水深6,897.5m、海底下深度854.81mに設置することに成功した[12]。また、2013年4月には無人探査機「かいこう7000Ⅱ」で観測システムを回収し(図12参照)、地震解明に役立てることができた[14]。南海トラフNanTroSEIZE C2ライザーレス孔用長期孔内観測システムと同様に孔内センサから孔口のロガーへ伝送されたデータをROVで繰り返し回収可能とするシステムも開発したが、最終的に時間の制約があり、今回は設置を見送った。

ここから海底下854.8mまで掘削し、地震滑りにより蓄積された摩擦熱を計測するための長期孔内観測システムを設置した。
写真は観測システムを「かいこう」で回収する直前の映像。
孔口装置にはプロジェクトの想いを込めて「忘れない3.11」とメッセージが残されている。
より高品質コアをよりたくさん回収
科学掘削は資源掘削とは異なり、海底下浅部から深部に至るまでの連続的で高品質なコア試料の採取が求められている。絶えず海況が変化する洋上で、海底から何千メートルも下の不安定な地層からコアを回収することは容易なことではない。特に、今後期待される地震断層や、地殻とマントルの境界面などの複雑な地層からコア試料を得ることは非常に困難なことである。例えば、コアを掘り出すコアビットのモーターは船上に設置されており、水深が深くなればなるほど、モーターとコアビットの距離が遠くなるため、切削力のコントロールが難しくなる。そこで、孔内におろしたパイプの先端部にタービンを取り付け、船上から送る泥水で駆動させるタービン駆動コアリングシステムの開発を進めている(図13参照)。また、「ちきゅう」は船上に三次元X線CTスキャナーを搭載しており、非破壊でコアの表面形状、サイズ、割れ、そしてコア全体の状態を把握でき(図14参照)、掘削パラメーター、コアビット、コアリング方法などとの関係を調べ、掘削パラメーターの最適化を図るなどコアの品質・回収率改善へ向けた取り組みも行っている [13]。
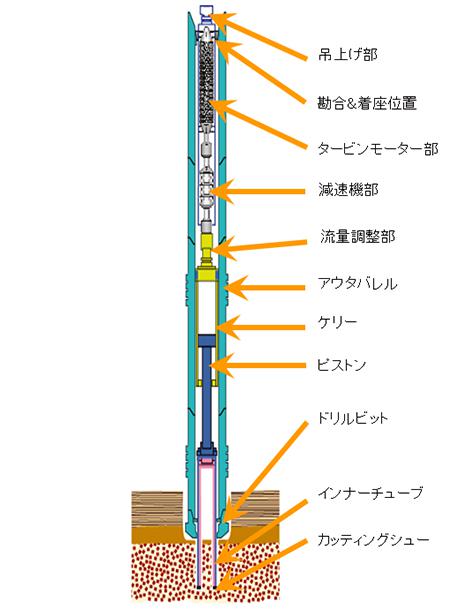
船上から送られる泥水で駆動され、高速回転、低ビット荷重で良質のコア回収を目指す。
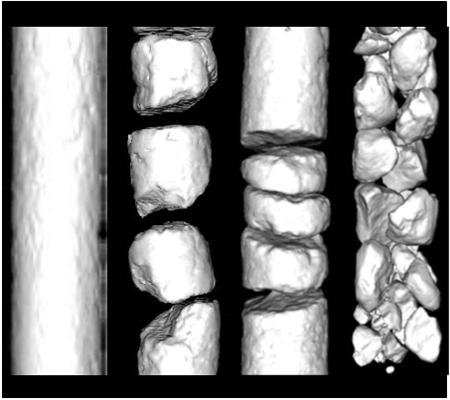
コアの表面形状、サイズ、割れ、全体の状態が把握でき、掘削パラメータの最適化にも利用される。
おわりに、未踏の科学ミッション
NanTroSEIZEとJFASTの科学ミッションを成功に導くために、今までの石油掘削や科学掘削で経験したことのない強海流、悪海気象、大水深、大深度掘削などに起因する多くの技術的課題を乗り越える挑戦が行われてきた。
地球は過去に多くの大規模環境変動を経験してきた。その記録は唯一、海底下にのみ残っていると言っても過言ではない。大水深掘削科学は、地震、温暖化、生命起源の解明など地球生命科学の新たなフロンティアになりつつある。
IODPは、地球システムと環境影響の解明という新たな研究テーマを加えて、2013年に新時代の幕を開けた。そして、「ちきゅう」は、人類初、そして、科学掘削プログラム創設時からの夢であったマントル到達に向けて、将来は水深4000m超、海底下7000mまでを掘ることを目標にしいる。これを達成するには、超大水深で使用可能な泥水循環システム、より強度の高いドリルパイプ、より高度な船位保持システム、高い温度でも使える泥水の開発など、さらなる技術開発が必要である。「ちきゅう」はこの未踏の科学ミッションへ向けてさらに進化を続けるのである。
参考文献
- Kyo, M., Y. Isozaki, K. Wada, M. Kobashi, E. Miyazaki, T. Inoue, Y. Namba, “Status Report on Deep Sea Drilling Vessel “CHIKYU” -Design and SIT Operation-“, Proc. 7th ISOPE Ocean Mining Symposium, 1-5, 2007
- Inoue, T., K. Wada, M. Kyo and E. Miyazaki, “Technical Challenges in the Scientific Dee-Sea Drilling Vessel “CHIKYU” for Deep Drilling and Coring,” Proc. 2nd PAAMES and AMEC Conference, 2006
- IODP proposal 603-CDP3, “NanTroSEIZE: The Nankai Trough Seismogenic Zone Experiment Complex Drilling Project”, http://www.iodp.org/600/.
- IODP proposal 787-RRD, “Japan Trench Fast Earthquake Drilling Project (J-FAST)”, http://www.iodp.org/700/.
- Agarwal, P., S. McNeill, T. Saruhashi, I. Sawada, M. Kyo, E. Miyazaki, Y. Yamazaki, and K. Aoike, “Extreme And Fatigue Profiles For Kuroshio Current Using Inverse Reliability And Proper Orthogonal Decomposition Techniques”, Proc. OTC 2013, in press, 2013.
- Kitada, K., E. Araki, T. Kimura, Y. Mizuguchi, M. Kyo, T. Saruhashi, I. Sawada, Y. Namba, and M. Kinoshita, “Field experimental study on Vortex Induced Vibration behavior of the drill pipe for the ocean borehole observatory installation”, IEEE, J. of Ocean Engineering, VOL. 38, NO. 1, 2013
- Miyazaki, E., M. Ozaki, S. Nishioka, and J. Minamiura, “Application of riser fairings to the D/V CHIKYU during drilling in high current area,” Proc. OCEANS 2008 & Techno-Ocean2008, 2008
- Kluk, D.J. , S.I. McNeill, K. K. Bhalla, T. Saruhashi, I. Sawada, M. Kyo, E. Miyazaki, and Y. Yamazaki, “Development of a Real-Time Riser Fatigue Monitoring System”, Proc. OTC 2013, in press, 2013.
- Inoue, T., M. Kyo, K. Sakura and T. Fukui, “Drill String Strength Evaluation for Deep Earthquake Zone Drilling,” Proc. 31st OMAE, 2012.
- Inoue, T., M. Kyo, K. Sakura, “Fatigue Strength Evaluation of Drill Pipe for Challenging Deep Drilling Project ?JFAST,” Proc. 23rd ISOPE, in press, 2013.
- Kyo, M., T. Saruhashi, I. Sawada, Y. Namba, E. Araki, K. Kitada, T. Kimura, “Plan and Technological difficulties on NanTroSEIZE Long Term Borehole Monitoring System”, Proc. UT 2011 & SSC 2011, 1096, 2011
- Kyo, M., Y. Namba, T. Saruhashi, I. Sawada, N. Eguchi, S. Toczko, Y. Kano, M. Yamano, H. Muraki, P. Fulton, E. Brodsky, E. Davis, T. Sun, J. Mori, F. Chester, “Development of Observatories for the Japan Trench Fast Drilling Project”, AGU2012 Fall meeting, T13F-2691, 2012.
- Shinmoto, Y., “A STUDY OF THE CORE RECOVERY AND QUALITY FOR IODP EXPEDITION 333”, Proc. JFES, 2012
- Namba, Y., M. Kyo, Y. Kano, T. Kasaya, P. Fulton, H. Muraki, Y. Nanbu, N. Yamauchi, A. Miura, “The Retrieval of The Borehole Observatory System Installed in The Tohoku Earthquake Zone”, The 11th SEGJ International Symposium, 190, 1-5, 2013
(きょ まさのり)
許 正憲(きょ まさのり) 氏 プロフィール
1960年台湾生まれ。78年都立三鷹高校卒業。82年東京農工大学工学部生産機械工学科卒業、84年同大学工学部機械システム工学専攻修士課程修了、94年同大学工学部機械システム工学専攻博士課程修了(博士(工学))。86年海洋科学技術センター(現海洋研究開発機構) 入所。98年から99年までカリフォルニア大学サンディエゴ校スクリップス海洋研究所客員研究員。2005年から14年まで東京大学生産技術研究所客員教授。深海工学を専門としており、「しんかい6500」、「かいこう」、「ちきゅう」の開発などに参画。