
1.はじめに
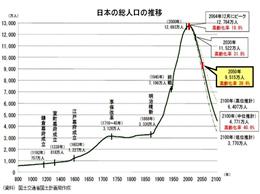
日本は1970年に高齢化社会(高齢化率7〜14%)へと突入し、95年には高齢社会(高齢化率14〜21%)、2007年には超高齢社会(高齢化率21%〜)を迎えた。現在、その高齢化率も27%を超え、近い将来、人口は今の3分の1に、高齢化率は40%に達するという予測もある。 30年までには支援が必要な年齢層の人口が大幅に増加し、世界でもこれまで経験のない状況を迎える。
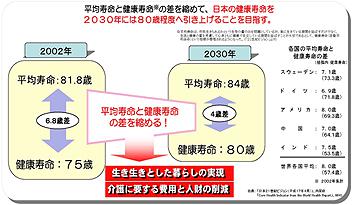
さらに特筆すべきは、そのスピードである。高齢化先進国の欧州の国々が比較的長い年月をかけて高齢化が進んでいったのに対し、日本は1970年〜2007年のたった26年間で 7%から14%へと倍増した。例えば、フランスでは1865年〜1980年の115年を要したにもかかわらずである。そのために、インフラ整備が間に合わなかったり、資金面での対応が遅れたりと、多くの問題の原因となっている。それに対し、この少子高齢化社会を乗り越えるため、国策として健康寿命の引き上げを大きな目標としている。つまり、介護が必要となる実質年齢を引き上げ、その対象者数を低減させたいという考えである。
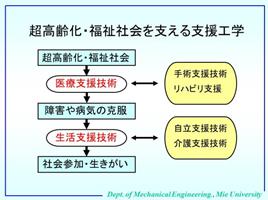
一方で、近年のロボット技術の発展に伴い、医療・福祉分野におけるロボット・制御技術の実用化への試みが多くなされている。これら技術に期待されることとしては、これまで人手による支援が必要であった方々の自立度を上げ、QOL(生活の質)を向上させ、生き生きとした暮らしを実現することである。また、健康寿命をロボットや機械システムの力を通して引き上げ、介護に要する費用と人財の大幅な削減を実現することである。
2.福祉ロボットの現状
一般的には、「医療・福祉分野」とよく医療と福祉を併せて呼ばれることが多いが、実はロボットの分野では対極的な意味を持つことが多い。例えば、医療ロボットは、指定された特殊な場所(手術室内など)で使用され、必要な機能が限定される局地・特化型のロボットである。それに対し、福祉ロボットは、各家庭や施設、屋外におけるさまざまな環境においての使用が必要とされ、また排泄、入浴、食事、移動、移乗、着替えなどの多くの機能が必要となる汎用・多用途型のロボットでなければならない。もちろん福祉ロボットでも、特定の用途に特化したロボットの開発も可能であるが、現状では各家庭にたくさんの高価なロボットを導入することは困難である。
その結果、「ダヴィンチ」に代表される医療分野における手術支援ロボットや医療用のロボットスーツ「HAL」はすでに実用化され、ここ数年間の間に世界中の多くの病院・施設で採用されているが、自立支援や介護支援を目的とした各家庭や福祉施設で活躍している福祉ロボットは未だ皆無である。
 |  |
| 図2. 手術支援ロボットダヴィンチと支援技術について |
3.食事支援ロボット開発を通して
研究室では、以前より実際に手を動かして食事や手作業をすることを支援する自立志向型生活支援ロボットの開発を行っている。このような支援ロボットにより、介護者の負担軽減に貢献するだけでなく、障がい者の自立志向を促し、「自分の力で何かができる」という喜びを提供することが可能となる。また介護者が不可欠であった作業を自分一人の力で行えるようになるということは、想像する以上に日々のストレスから解放され、生きる力を生み出す。
開発した食事支援ロボットでは、高齢者やパーキンソン病患者などを対象とし、握力が弱くスプーンなどを把持できなかったり、手の震えによって思うように食事することができない方でも、「ロボットに食べさせてもらう」のではなく、「ロボットを利用して自分で食べる」ことのできる生活支援ロボットを実現した。技術的には、(1)液体搬送機能(すくったものは溢さない) (2)衝突回避機能(どんなに動かしてもぶつからない) (3)振戦抑制機能(手ぶれを抑え利用者の意思をロボットに正確に伝える)を実現するなど、多くの成果が得られた。しかしながら、結果的に未だ広く普及することのない福祉ロボットの1つとなっている。(現在、これらの技術は他の福祉ロボットや福祉以外の多くの分野に展開され、有効利用されていることを付け加えておく。)
では、何が問題であったのか? さまざまな要因が考えられる中で、ここでは3つの問題を指摘しておく。
1つは、産業用のロボットと福祉用のロボットを同じようなコンセプトで開発してしまっていること。つまり、高機能だが、個人では到底購入することのできない非常に高価なロボットとなっている。もちろん、国の支援を得ることで購入が可能となるかもしれないが、開発段階から“支援ありき”で福祉ロボットを製作しても、今後の少子高齢化の状況を鑑みれば、支援を受けることは非常に難しく、広く普及していくとは考えにくい。また、安くても必要な機能が得られないものは、当然こちらも普及しない。よって、いかにして、利用者が自ら購入できる価格設定と生活の中で必需品となり得るロボットを開発できるか、ということがポイントとなる。
次に、福祉ロボットの開発環境の問題である。我々も当初は、ある程度装置を完成させた上で、病院や施設を訪れ、意見交換を行うというアプローチを取っていたが、多くの問題があった。例えば、安全性の都合上、製作途中の装置のテストが実施できないことである。装置が完成してから問題に気づいても、取り返しのつかないことになっていたり、改良に長い時間がかかり、開発のペースの大幅な遅れとなったりしてしまう。また、技術者同士、研究者同士での議論とは異なり、なかなか真に欲しい技術的な情報が得られないときも多い。そこで、我々の研究チームでは、実際に障がい者の方々に開発チームに入っていただき、研究開発に携わっていただくだけでなく、プロの福祉ロボットユーザーとなる育成を行っている。また研究室の学生を含め、実際の障がい者の方と寝食をともにすることで、得られる情報・知識・経験は計り知れない。
最後に、自立の定義である。特にエンジニアは自動で便利な装置の開発は得意であるが、高齢者・障がい者にとっては、それが常に最高のものであるとは限らない。例えば、食事支援ロボットの試用を行った際、利用者から、「もしそれを買って使えるようになれば、今来てもらっているヘルパーさんは来なくなってしまいますか?」と心配される。また、自動で寝返りできるベッドの例では、家族の方の負担は減ってよかったが「定期的に顔を見にきてくれた家族があまり来なくなってしまい非常に寂しい」という意見も出た。つまり、自立とは「周りの支援・人は要らない、すべて自動でできる」ということだけではない。単に便利で、当事者を孤立させてしまうものは、利用者が期待する自立支援とはいえない。生きる喜びを持ち、人と人とを結びつけるような自立を実現するモノづくりが特に大切となってくる。
 |  |  |
| 図3. 食事支援ロボットMARo(マーロ) |
4.自ら楽しみ体を動かせるリハビリへ
「誰もが自由に音楽を楽しむ」ことを目的として、 (株)ヤイリギターが新しいタイプのギター「一五一会」を開発した。このギターは複雑なコードを押さえなくても、指一本で簡単にコードを押さえることができるため、高齢者や楽器をさわったことのない方でも簡単に演奏することが可能である。そのため、音楽療法の現場や医療・福祉の分野においても、一五一会が使用され始めている。しかし、この一五一会でも、指先を動かせない障がい者には、一人で一曲を弾くのは困難であった。
そこで、上肢に障がいがあり、指先が全く動かすことができない頸髄損傷者(主にC5 レベル程度)の方でも弾くことができるギター演奏支援自助具「響楽」の開発を行った。この響楽は、てこの原理を利用し、装具の形状など工夫することで、一つのコードしか弾けない方でも、一曲を演奏できるようになり、不可能だったギター演奏を可能とした。さらには、ギターを持って外へ出て、興味のある対象に対して積極的に体を動かすことによって、筋力も付き、大きなリハビリ効果が期待できることが分かってきた。
つまり、病院でのリハビリももちろん重要であるが、自ら楽しみながら社会参加し、生き生きとした生活を送ることで、運動感覚や機能の回復・改善、心身のリラックス効果、歌うことでの肺活量増加、コミュニケーション機会の増加などが期待できる。そして、ここに一つの大きなニーズがあると確認している。
ほぼ同時期に、緊張性アテトーゼ型脳性麻痺患者の方から、絵を描きたい・字を書きたいという依頼を受けた。身体障がいを持つ方々の中には、残存機能を生かしながら自己表現の手段や生きがいとして絵画に取り組む方も多い。しかしながら、不随意運動を伴う場合は意志通りに身体をコントロールできず、緻密な作業や力加減の調節が困難となり、自由表現が制限される。また、パソコンやスマートフォンなどがうまく使えず就労の妨げとなる場合もある。そこで、非周期的で複雑な不随意運動を伴う方を対象とし、不随意運動の影響を減衰する描画・筆記支援システムを開発した。結果として、絵や字が自分の意思通りにかけるだけでなく、精神的に安定した状態でさまざまな作業ができるようになった。これもまた自ら楽しみながら社会参加し、生き生きとした生活を送る支援装置となることを期待している。
 |  |  |
| 図4. ギター演奏支援自助具(響楽)と描画・筆記支援システム |
5.上肢動作支援ロボット(アクティブギプス)によるモビリティーの向上
全国の身体障がい者数は350万人を超えて年々増加傾向にあり、そのうちの12.7%が上肢機能障がい者と言われている。上肢機能の不全のために、車いす操作、移乗動作、ドアを開く、物を押さえるなどの日常生活に必要な動作が困難となる。中でも、車いす操作やベッドなどへの移乗動作は、車いす生活者にとって非常に重要であり、上肢の力が弱まり、力を十分に発揮できない場合は、車いすを思い通りに操作できないだけでなく、疲れやすい、坂道を登れない、段差が越えられないなど行動範囲に制限ができてしまう。また、力を発揮できないことにより自分で体勢を変化させることができず、長期にわたり同じ体勢で座ることになり、褥瘡(じょくそう:体と支持面との接触局所で血行が不全となり、周辺組織が壊死すること)の原因となる。
車いす操作を支援するために、電動車いすやパワーアシスト車いすといった物も存在するが、微力でも上肢を十分に動かすことができる人にとっては、過剰な支援により残存機能を生かすことができず、残存機能の低下を招いてしまう。さらに現在の日本の状況では、電動車いすでは行動範囲が限定されることが多く、できる限り手動の車いすを利用したいという要望も多い。
一方で、近年研究が進んでいる装着型の支援ロボットは、汎用性があり、使用方法に制限されることが少なく、さまざまな生活動作に活用できることが期待されている。しかしながら、これまでに研究されているものは、介護や作業用アシストを行うための健常者が装着するタイプのものであったり、大型で重いものであったりと、小型軽量で実際の日常生活の場において使用可能な装置は存在しない。そこで我々の研究チームでは、車いす操作や移乗、ドアを開く、物を押さえるなどの日常動作を対象として、上肢機能障がい者が、残存機能を有効的に活用することを可能とする残存力伝達機構を有する外骨格型ロボットの開発を行っている。
現在、装置の重量はバッテリー、センサ、モータすべてを搭載しても、500グラムを下回るところまで軽量化されており、長時間の使用にも耐えうる構造となっている。利用者の残存機能をフルに活用することにより、発熱も問題も解決し、服の中に装着することも可能である。このロボットの一番の特徴は、動力源となるロボットと軟部組織に覆われた人体を繋(つな)げるロボット専用装具にある。筋肉の収縮・増幅を考慮し、利用者の肩から装着しなくてもずれ落ちない構造と、ロボットからの力を確実に人体に伝達することのできる構造を併せ持つことがポイントである。
「アクティブギプス」を使用することにより、これまで困難であった自立した日常生活を可能とし、さらに、リハビリ効果による残存機能の向上が期待できる。また、これまで介護者の支援なしにはどこにも自由に移動できなかった上肢障がい者が、自分の力で好きなときに、健常者が歩くのと同じスピードで車いすを漕ぐことができるようになり、障害者のQOLの向上が期待できる。
 |  |  |
| 図5. 上肢動作支援ロボット(アクティブギプス) |
6.おわりに
今後、日本は世界に先駆けてハイスピードな“超々高齢社会”を迎える。その環境の中で制御工学、ロボット工学、人間支援工学の担う可能性と必要性は非常に大きい。医学、解剖学心理学、デザイン科学など複合的な知識との融合を続けながら、開発を続けていくことが重要である。人を遠ざけるロボットでなく、人々を結びつけるロボットの開発を目標に、超高齢社会における障がい者・高齢者の自立生活の実現、さらには、楽しみながらの健康長寿社会を支えるリハビリシステムの開発を目指す。
参考文献
- 栗山嘉文, 矢野賢一, “溢流の防止を考慮した液体ハンドリング制御”, 日本機械学会論文集C編, 第75巻, 第754号, 1690頁~1697頁, 2009年
- 矢野賢一, 大原瑛一, 堀畑聡, 青木隆明, 西本裕, “適応フィルタを用いた振戦抑制制御システムの開発と食事支援ロボットへの応用”, 計測自動制御学会論文集, 第45巻, 第12号, 638頁~645頁, 2009年
- E.Ohara、 K.Yano、 S.Horihata、 T. Aoki and Y. Nishimoto、 “Tremor-Suppression Control of Meal Assist Robot with Adaptive Filter”、 Proc. of ICORR2009 (11th IEEE International Conference on Rehabilitation Robotics)、 pp. 498-503、 Kyoto、 Japan、 23-26 June、 2009
- K.Yano、 J.Hashimura、 T.Aoki and Y.Nishimoto、 “Flexion-Extension Motion Assistance Using an Upper Limb Motion-Assist Robot Based on Trajectory Estimation of Reaching Movement”、 Proc. of EMBC’09 (31st Annual International Conference of the IEEE Engineering in Medicine and Biology Society)、 pp. 4599-4602、 Minnesota、 USA、 2-6 September、 2009
- T.Watanabe and K.Yano、 “Extension Assist Control for Individuals with Cervical Cord Injury Using Motion Assist Robot for Upper Limb”、 Proc. of EMBC’10 (32nd Annual International Conference of the IEEE Engineering in Medicine and Biology Society)、 pp. 1312-1315、 Buenos Ales、 Argentina、 31 August – 4 September、 2010
- K.Nishiwaki、 S.Hiramatsu and K.Yano、 “Tremor Suppression using Proxy-Based Sliding-Mode Control for a Meal-Assist Robot”、 Proc. of IASTED Technology and Management Conferences on Robotics、 pp. 34-39、 Phuket、 Thailand、 24-26 November、 2010
- 中尾智幸、青山寛明、矢野賢一、宮川成門、窪田直樹、堀畑聡、“緊張性アテトーゼ型脳性麻痺を対象とした描画支援システムの開発”、日本機械学会論文集C編、第77巻、第780号、3047頁~3057頁、2011年
- T.Nakao、 H.Matsui、 K.Yano、 N.Kubota、 N.Miyagawa and S.Horihata、 “Drawing Assist System for Reducing Effects of Involuntary Movements of Cerebral Palsy、 Special Issue on Biomechanics of Human Movement for Medical and Welfare Application、 Journal of Biomechanical Science and Engineering、 Vol.6、 No.5、 pp.362-377、 2011
- E.Ohara、 T.Watanabe、 K.Yano、 T.Oishi、 T.Aoki and Y. Nishimoto、 “Assistance Control of Wheelchair Operation Using Active Cast for the Upper Limb”、 Proc. of IEEE ICRA (IEEE International Conference on Robotics and Automation)、 pp. 2223-2228、 Shanghai、 China、 9-14 May、 2011
- H.Aoyama、 T.Nakao、 N.Miyagawa、 N.Kubota、 S.Horihata and K.Yano、 “Development of Drawing Assist System for Patients with Cerebral Palsy of the Tension Athetosis Type”、 Proc. of IEEE ICRA (IEEE International Conference on Robotics and Automation)、 pp. 4664-4669、 Shanghai、 China、 9-14 May、 2011
- T.Enya、 M.Yamane、 H.Nakamura、 T.Aoki、 Y.Nishimoto、 K.Yano、 “Upper Limb Flexion Assistance Based on Minimum-Jerk Trajectory Using Wearable Motion-Assist Robot”、 Proc. of IFAC’11 (The 18th International Federation of Automatic Control Triennial World Congress)、 pp. 5962-5967、 Milan、 Italy、 28 August – 2 September、 2011
- T.Watanabe、 K.Yano、 T.Aoki and Y.Nishimoto、 “Extension Motion Assistance for Upper Limb Using Proxy-Based Sliding Mode Control”、 Proc. of IEEE SMC (IEEE International Conference on Systems、 Man、 and Cybernetics)、 pp. 2885-2890、 Anchorage、 USA、 9-12 October、 2011
- 中尾智幸、坂本良太、宮川成門、窪田直樹、矢野賢一、“非周期的不随意運動を対象とした誤描画防止制御システムの開発”、計測自動制御学会論文集、第49巻、第12号、1139頁~1146頁、2013年
- N.Mizutani、 T.Watanabe、 K.Yano、 T.Aoki、 Y.Nishimoto and Y.Kobayashi、 “A Wheelchair Operation Assistance Control for a Wearable Robot Using with User’s Residual Function”、 Proc. of ICORR (13th IEEE International Conference on Rehabilitation Robotics)、 CD-ROM、 Seattle、 USA、 24-26 June、 2013
- N.Mizutani、 M.Yamane、 N.Kato、 K.Yano、 T.Aoki、 Y.Nishimoto and Y.Kobayashi、 “Control of Wearable Motion Assist Robot for Upper Limb Based on the Equilibrium Position Estimation”、 Proc. of EMBC (35th Annual International Conference of the IEEE Engineering in Medicine and Biology Society)、 pp. 334-337、 Osaka、 Japan、 3 – 7 July、 2013
- K.Yonezawa、 N.Mizutani、 N.Kato、 K.Yano、 T.Aoki、 Y.Nishimoto and Y.Kobayashi、 “Extension Force Control Considering Contact with an Object Using a Wearable Robot for an Upper Limb”、 Proc. of IEEE SMC (IEEE International Conference on Systems、 Man、 and Cybernetics)、 pp. 3555-3560、 Manchester、 England、 13-16 October、 2013
- T.Yabunaka、 N.Shinoda、 A.Nakanishi、 N.Kobayashi、 N.Kawaguchi and K.Yano、 “Development of an Improved Lower Limb Orthosis for a Motion-Assist Robot for the Lower Limb”、 Proc. of IEEE ICAR (IEEE International Conference on Robotics and Automation)、 Paper No.0144、 Montevideo、 Uruguay、 25-29 November、 2013
(やの けんいち)
矢野 賢一(やの けんいち) 氏 プロフィール
1969年大阪府生まれ。88年大阪府立千里高等学校卒業、 99年豊橋技術科学大学大学院工学研究科博士後期課程修了。同年豊橋技術科学大学工学部生産システム工学系助手、2004年岐阜大学工学部機械システム工学科助教授、06年岐阜大学工学部人間情報システム工学科助教授、 10年三重大学大学院工学研究科機械工学専攻教授 となり現在に至る。02年8月~03年8月ベルリン工科大学客員研究員。