
1. はじめに
現在、JAXAでは「未来を切り拓くロケット開発」をスローガンに最新鋭の固体燃料ロケット「イプシロン」の開発を進めています。待望の初飛行もいよいよこの夏に迫りました。そこで開発現場の熱気をみなさんにお伝えするとともに、イプシロンロケットの魅力や今後の構想についてお話ししてみたいと思います。
2. 日本の固体ロケットの発展とイプシロンの誕生
日本の宇宙開発は糸川英夫博士のグループによる「ペンシルロケット」の水平発射実験(1955年)に始まるとされていますが、原点はそれに先立つ1954年に示された「ロケット輸送機」の提案にこそあります。その頃すでに英国ではジェット旅客機「コメット」が就航しており、「いまさらジェット輸送機の研究をしても、追いつき追い越すまでにはなかなかなるまい。それなら後塵を拝するよりも、いっそのこと欧米に一歩先んじた研究に取り掛かろう」という見事な発想でした。このような“未来にくさびを打つ”進取の精神が、日本が独自に築いてきた固体ロケット技術の源流にあるのです。
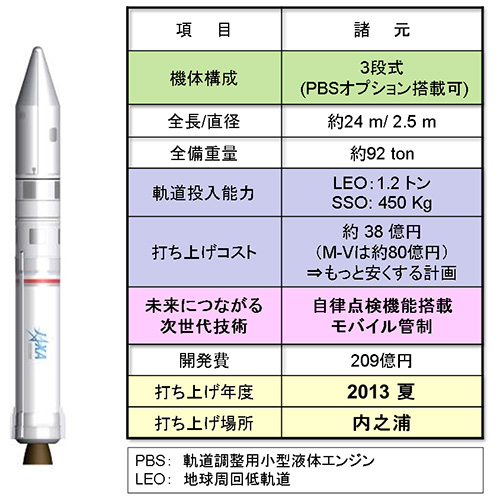
ペンシル以来、日本の固体ロケットは純国産技術として目覚ましい発展を続け、日本の宇宙開発のいくつもの節目を華々しく飾ってきました。1970年には「ラムダロケット」により、日本初の人工衛星「おおすみ」の打ち上げに成功。1985年になると「M-3SII型ロケット」でハレー彗星探査をやり遂げましたが、これが日本で最初の“地球重力圏の脱出”です。さらに1990年代に入ると、ついに“世界最高性能”と謳われた「M-Vロケット」が登場、世界初の小惑星サンプルリターンミッション「はやぶさ」を打ち上げるなど大活躍しました。そして今、JAXAでは固体ロケットの最新鋭機としてイプシロンの開発を進めているのです。来るべき小型衛星時代に備えて、ロケットの規模を少しコンパクトにするとともにコストを大幅に下げて、打ち上げの機会を増やそうというのが狙いです。小型衛星と一体となって、面白いことをどんどん実現していきたいと思っています。

(提供:JAXA)
(提供:JAXA)
3. 未来を切り拓くイプシロン
3.1 イプシロン開発の意義
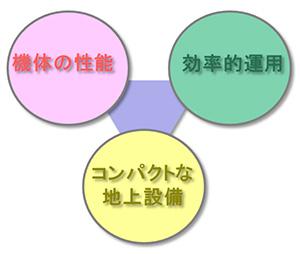
イプシロンロケットの開発の意義は「未来を拓くロケット開発」ということにあります。その目的は、ロケットを打ち上げる仕組みをシンプルにして、みんなの“宇宙への敷居”を下げようということです。そこで、私たちは「自律点検」や「モバイル管制」を実現するなどして、イプシロンでは「世界一簡単に打ち上げられるロケット」を目指そうとしているのです。日本の固体ロケットは「世界最高レベルの性能」と言われていますが、イプシロンロケットでは、単に機体の性能だけでなく、組立てや点検などの運用を効率化、かつ地上の設備もコンパクトにして、打ち上げシステム全体をシンプルにしようと考えています。このような革新コンセプトは未来のロケットにも必ず必要なことであり、イプシロンは未来に向けた第一歩と言えます。
(提供:JAXA)
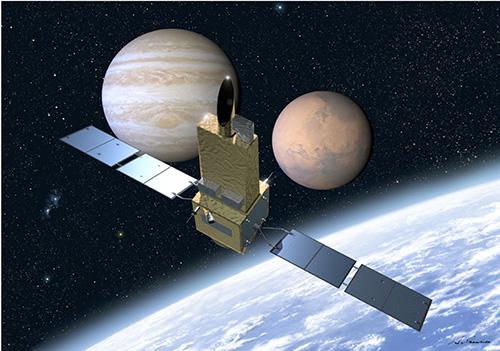
イプシロンロケットの1号機で打ち上げるペイロードは「惑星分光観測衛星」という小型科学衛星で、極端紫外線を用いた惑星望遠鏡です。このように惑星を専門に観測する宇宙望遠鏡は、世界でも初めての試みです。今JAXAでは、小型衛星に共通的に使えるバス(姿勢・軌道制御や電源、通信など衛星ごとのミッションに依らない共通の機能)の標準化(どの衛星にも利用可能にすること)を進めており、イプシロンと組み合わせることによって、ユーザにとってより身近な宇宙を目指しています。
(提供:池下章裕氏)
3.2 打ち上げシステムの改革
未来指向型ロケットのイプシロンでは、これまでのロケット開発の慣性を超えて、いろいろな新しい取り組みを進めていますが、その中でも代表選手は「打ち上げシステムの革新」です。私たちは搭載系を知能化して、これまでは地上から人手と時間をかけて行っていた打ち上げ前の面倒な点検作業を、これからはロケット自身にやらせようと考えています。これが世界で初めて挑戦する「ロケットの自律点検」です。
このようなことが可能になると、ロケットの打ち上げの風景もずいぶん変わってくるでしょう。例えば、これまでのロケットの管制室は大がかりな管制装置と大勢の人数で、まるでお祭り騒ぎ(いうなれば「アポロ方式」)でした。それがこれからはパソコン1台か2台の数人に集約でき、しかもネットワークにアクセスさえできれば、原理的には世界中のどこからでもロケットの管制ができるようになるのです。このような夢のような打ち上げシステムを私たちは「モバイル管制」と呼んでいますが、ようやく40年前の空想ファンタジーが今、現実のものになろうとしているのです。

(提供:JAXA)
モバイル管制は、これまでのロケット開発の常識を覆す革命です。イプシロンで実現した暁には、瞬く間に世界に広がっていくことでしょう。まさに世界のロケット開発の未来を拓く「イプシロン方式」の誕生です。日本の固体ロケット技術は、惑星探査にも活用できる世界一の性能を誇ってきました。これからは性能ばかりでなく、打ち上げシステムのシンプル性でも世界のお手本です。まさにイプシロン開発は“世界一から世界一への挑戦”と言えるでしょう。
モバイル管制の開発も最終段階に入り、搭載の電子機器と組み合わせた試験も無事に終了しました。イプシロンの開発が始まったばかりのころ、本当に「モバイル管制」のような革新コンセプトが実現できるのか、ずいぶん心配されたものです。今ようやくみんなの努力の成果がこうして形になって表れてきたことは、開発の責任者として本当に感激もひとしおです。これまでロケットの管制室は発射台の近くの地下にあって、窓もない息苦しい環境でしたが、これからは発射台からずっと離れたごく普通のビルの中で快適に作業ができそうです。

(提供:JAXA)
4.イプシロンの今後の発展構想
開発も佳境に入ってくると、大事なのは次のステップ、すなわちイプシロンの発展構想です。イプシロン開発は長期的展望をしっかりと立てて戦略的に進めており、キー技術の成熟度に応じて2段階に分けて進める計画です。

(提供:JAXA)
第1段階の目的は「自律点検」や「モバイル管制」など、未来を拓く超革新技術を世界に先駆けて実現することにあります。一方で、開発コストを最小限に抑えるために、既存技術を最大限に活用する方針です。これが今年の夏に打ち上げるイプシロンです。続く第2段階では、抜本的な低コスト化を行って、高性能低コスト版イプシロン、通称「E1形態」を2017年ころの打ち上げを目指して実現しようという構想です。目標とする打ち上げコストは約30億円ですが、実現すれば、この規模のロケットとしては申し分のないレベルです。現在、高性能低コスト化技術の研究を進めていますが、携帯電話のように小さい搭載機器やプラモデルのように簡単に組み立てられるロケットを目指しています。
宇宙ロケットの世界は今、まさに歴史の転換点を迎えようとしています。これからは単に機体の性能を上げるだけではだめで、製造から打ち上げ、そして搭載系に至るまで、およそロケットの打ち上げに関わるライフサイクル全体をシンプルにしていこう、というコンセプトが大切です。このためイプシロンでは、ロケットの知能化による「モバイル管制」の実現に取り組んでいます。続くイプシロンの第2段階では、ロケットの知能をさらに高めて、打ち上げ射場全体を“テレビの中継車”くらいコンパクトなものにしようと考えています。ここまでくると、打ち上げ射場にはただ発射台さえあれば十分で、未来のロケットに向けた土台がしっかり整うことになります。
こうして、一歩一歩確実に新しい技術を開拓して、将来の「再使用可能なロケット」につなげていきたいと考えています。これはとても大事なポイントです。なぜなら、未来の宇宙ロケットがどういう形になろうとも必ず「共通的に必要な技術」というものがあって、それこそがイプシロンで進めている打ち上げシステムの改革だからです。これまでの宇宙開発の50年はペンシルロケットから始まりましたが、これからの50年はイプシロンロケットから始めたい。イプシロンを起点として未来を切り拓いていきたいと考えています。
(もりた やすひろ)
森田 泰弘(もりた やすひろ) 氏 プロフィール
1958年東京都生まれ。82年東京大学工学部航空学科卒業。87年東京大学大学院工学系研究科博士課程修了。工学博士。88年から2年間、カナダ・ブリテッシュ・コロンビア大学客員研究員として宇宙ステーション用ロボットアームの研究に従事。90年旧文部省宇宙科学研究所(現JAXA)システム研究系助手。同年スタートのM-Vロケット開発(主にシステム設計、誘導制御系)を主導。2003年7月から宇宙科学研究所 教授。同年10月からM-Vロケットプロジェクトマネージャー(開発責任者)としてJAXA統合後の同ロケットの打ち上げを指揮。さらにイプシロンロケットプロジェクトマネージャーとして、我が国の固体ロケット開発をリードする。専門はシステムと制御。