


近年、日本の少子高齢化は世界に先駆けて進んでおり、近い将来の超高齢化社会への対応が求められています。高齢者の割合が平均23%である現状から、来るべき超高齢化社会で高齢者の割合が40%を超えると、老人が老人を介護する、いわゆる「老々介護」が当たり前となります。このような、慢性的な労働人口の減少に対応するために、早期の実用化が期待されているのが、人間の生活環境下で働く“生活支援ロボット”です。
しかしながら今までのロボットは、世界市場4000億円の“産業用ロボット”を中心に製品化がすすめられ、世界の産業用ロボットの3分の2が日本で生産され、3分の1が日本で稼動しているといわれています。産業用ロボットの場合は基本的に、ロボットは工場内の人とは別の空間で働くことを想定されていますが、少子高齢化対策で期待されている“生活支援ロボット”は、人間生活と同じ空間を共有することが求められるため、その人間への安全性を考慮することが必須といえます(“サービスロボット”という言葉もあるが、サービスロボットには消防ロボットなどの“公共サービスのためのロボット”を含むのでここでは“生活支援ロボット”としています)。生活支援型のロボットを開発している企業も、このような生活支援ロボットの安全性を公的な機関が認証することで、生活支援ロボットの実用化を促進することを期待しています。
そんな中、平成21年度から平成25年度の5年間をかけての、NEDO(新エネルギー・産業技術総合開発機構)による「生活支援実用化プロジェクト」が開始され、以下の開発が進められています。
(1)生活支援ロボットの安全性検証手法の研究開発
(2)安全技術導入ロボットの開発
- 安全技術を導入した移動作業型(操縦が中心)生活支援ロボットの開発
- 安全技術を導入した移動作業型(自律が中心)生活支援ロボットの開発
- 安全技術を導入した人間装着(密着)型生活支援ロボットの開発
- 安全技術を導入した搭乗型生活支援ロボットの開発
「生活支援ロボット安全検証センター」(図1)は、このNEDOプロジェクトの開発拠点として、平成22年12月につくば研究学園に設立されました。ここは、4つの試験エリア(走行試験関連エリア、対人試験関連エリア、強度試験関連エリア、EMC試験関連エリア)、18の試験装置からなり、企業が開発した複数のロボットを対象に、ロボットの安全性を評価するための試験方法の開発を行っています。
 |
| 図1. 生活支援ロボット安全検証センターの外観 |
ここで培われた試験・検証技術は、国際標準化としてISO TC184/SC2に提案してきており、将来的にはこの国際規格にもとづいて、安全性の認証を行うための体制の準備を進めています(図2)。
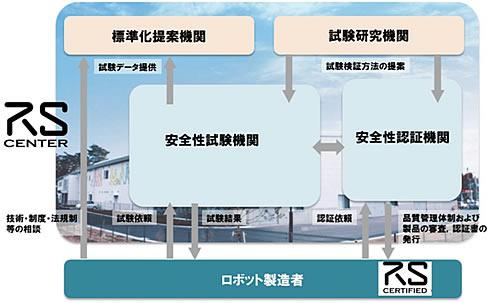 |
| 図2. ロボットの安全性認証にかかわる体制 |
このような、システムの“安全性”を「認証」という形で、製造者とユーザー間で相互理解を築く方法は、主にヨーロッパで広く進められており、残念ながら日本は「認証文化」という点では遅れているといわざるを得ません(図3)。しかしながら、日本の製造業の持つ品質の高さを海外に認めさせるためには、たとえ認証コストを製造者が払ったとしても、国際競争力を確立するためには有効な手段の一つであります。
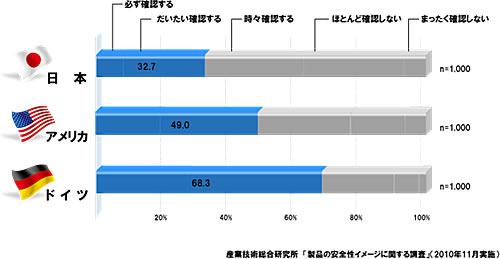 |
| 図3. 日本と海外の認証マーク確認動作比較 |
この動きは、システム一般に言われることで、例えば自動車でも国際規格ISO26262が制定され、この規格に準じた認証が世界的に行われようとしています。
認証には、製品の種類により、製造者とユーザー間での相互理解の方法として、「第1者認証」(製造者自体が自己認証)、「第2者認証」(ユーザー団体が評価)、「第3者認証」(公的機関が認証)の3タイプがありますが、ロボットはエレベータやエスカレータなどと同様、その安全性の評価には専門家の知識が必要であることから、「第3者認証」が妥当であるといわれています(図4)。
 |
| 図4. 専門的技術を有する製品の認証機関 |
さらに、安全性の評価には、その製品をビジネス展開する際に、リスクとベネフィットのバランスが必要とされており、リスクが大きくてもベネフィットが大きければビジネスにはなりうるが、逆に、リスクだけが大きくベネフィットが小さいものはビジネスにはなりえません(図5)。
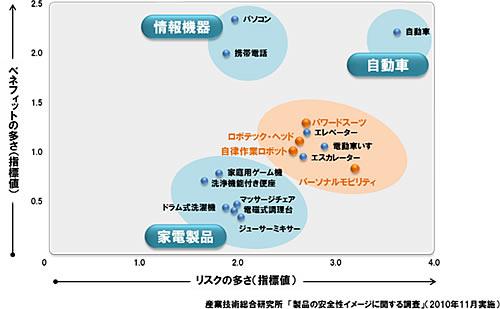 |
| 図5. リスクとベネフィットのバランス |
日本は概して、新しい技術を社会に投入するに当たっては、その安全性が担保されないうちは、非常に“慎重な国”であるといえます。例えば、高度医療がそのよい例です。高度医療の場合は、欧州、米国などで臨床実験が行われ、その安全性が評価されていないと、日本で独自に安全性を評価しても認められない、という事例が多く見受けられます。生活支援ロボットは、未だ欧米では開発段階であり、日本が世界に先駆けた技術を有しており、実証実験も広く進められています。しかしながら、あまりにも慎重に対応をしていると、日本のロボットを海外で実証し、その安全性を海外で評価されその先進的な技術が海外に流出した上で、海外で同様の製品が開発され、日本に逆輸入される可能性も出てきています。
現に、デンマークでは、日本のロボット企業をデンマークに誘致し、ロボット技術の実証をデンマークで行い始めています。
現時点で日本が世界に対して優位にあるロボット技術を、その高い国際競争力を維持したまま実用化することを可能とするためにも、生活支援ロボットの安全性の認証スキームの早期立ち上げが求められています。
(おおば こうたろう)
大場 光太郎(おおば こうたろう)氏のプロフィール:
1986年宮城県仙台第二高等学校卒業。 1986年東北大学工学部機械工学科卒業。 1991年東北大学大学院博士課程修了、博士(工学)。2009年から独立行政法人産業技術総合研究所知能システム研究部門副部門長、現在に至る。最近は人間生活環境下で実際に使えるロボットを目指し、ユビキタス・ロボットなどの研究に従事。IEEE、日本機械学会会員、日本ロボット学会正会員。現在、筑波大学連携大学院 教授、芝浦工業大学連携大学院 教授、東京大学大学院情報学環 客員准教授も兼務。