

日本が20日未明、実証機「スリム」によって月面着陸に挑む。旧ソ連、米国、中国、インドが達成済みで、成功しても5カ国目。だが決して後塵(こうじん)を拝するのではなく、技術の中身に大注目だ。これまで各国の月面着陸は位置の誤差が数キロ以上だったが、桁違いの100メートル級を目指す。着陸精度の制約から「大体この辺」と降り立っていたのに対し、ピンポイントの着陸となる。宇宙科学や月面開発の飛躍につながるだけに、乗用車より小さいほどの機体に、大きな期待が集まっている。
優位の技術で世界に貢献
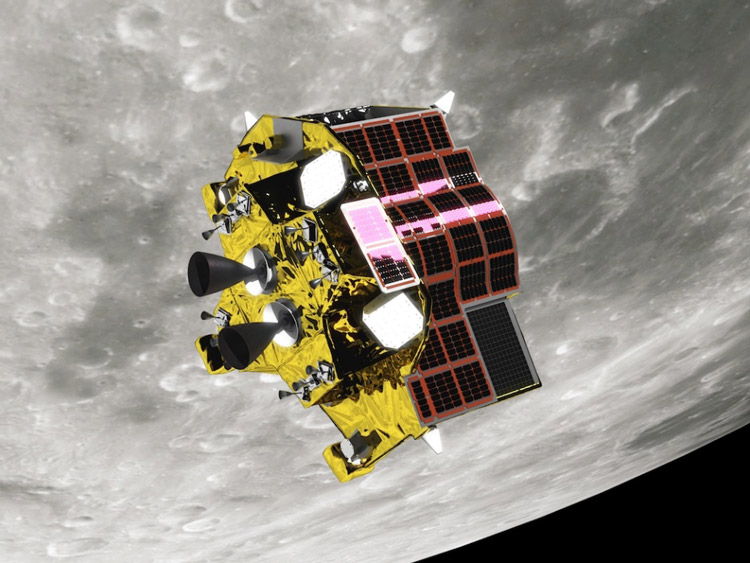
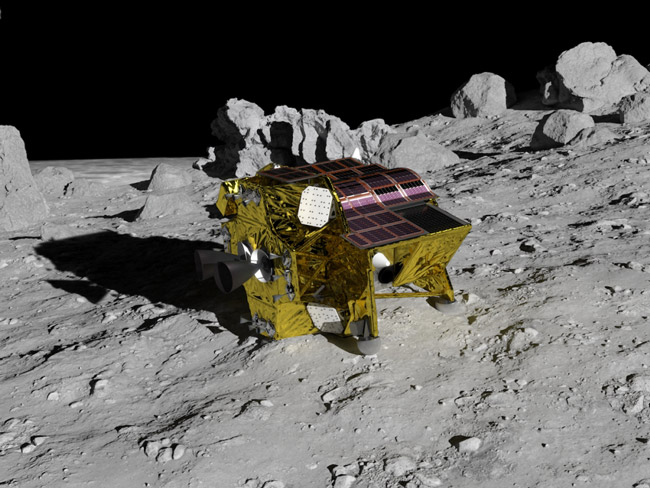
スリムは宇宙航空研究開発機構(JAXA)の計画。月面へのピンポイント着陸を小型軽量の機体で実証することを通じ、効果的で高効率の月・惑星探査、将来の資源開発につなげる。機体は高さ2.4、幅2.7、厚さ1.7メートル。燃料を含む重さは700キロほどと、1トン超~数トン級の従来の着陸機より軽い。名前は「Smart Lander for Investigating Moon(スマート・ランダー・フォー・インベスティゲーティング・ムーン=月を調べるスマートな着陸機)」の頭文字「SLIM」に由来する。開発費は約149億円(打ち上げ費用の一部と初期運用費用を含む)。
スリムの坂井真一郎プロジェクトマネージャ(JAXA宇宙科学研究所教授)は「ピンポイント着陸を実証できれば世界初だが、そこにだけ意義があるのではない。他国の持たない技術が非常に大きなアドバンテージ(優位)となり、今後の国際協力で役に立てる」とアピールする。
昨年9月7日、エックス線天文衛星「クリズム」と共に大型ロケット「H2A」で鹿児島県の種子島宇宙センターから、38万キロ離れた月を目指して打ち上げられた。地球を周回する楕円軌道に投入された後、月の引力などを利用して軌道と速度を変える「スイングバイ」をし、いったん地球から130万キロまで遠ざかった。その後も順調に航行し先月25日、月上空600~4000キロを南北に回る楕円軌道に到達した。さらに高度を下げた楕円軌道に移り、着陸の準備へと進んでいく。
デジカメ「顔認識」と同じ原理、クレーター目印に進む
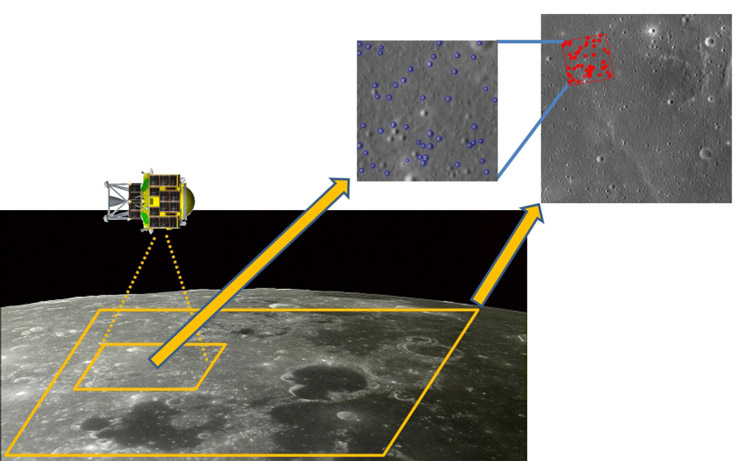
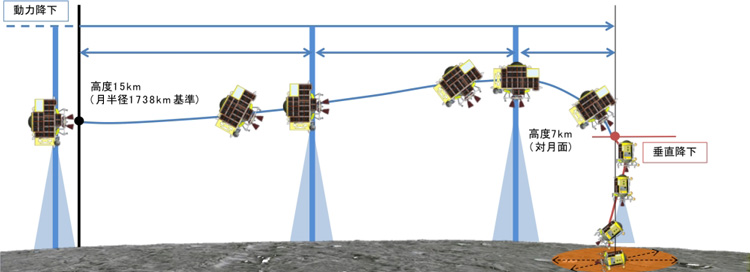
そして着陸作業。まず19日午後10時40分頃、高度15キロを航行するスリムが、飛行機の数倍という秒速1.8キロから減速し、降下を開始する。カメラで月面を撮り、周回機「かぐや」(2007~09年)の探査で得たクレーターの地図と照合して、機体の位置や高度をリアルタイムで把握。降下開始場所から800キロ離れた、着陸地点上空へと向かう。この「画像照合航法」の原理は、デジタルカメラの顔認識機能と同じで、顔ではなくクレーターを目印にするものだ。
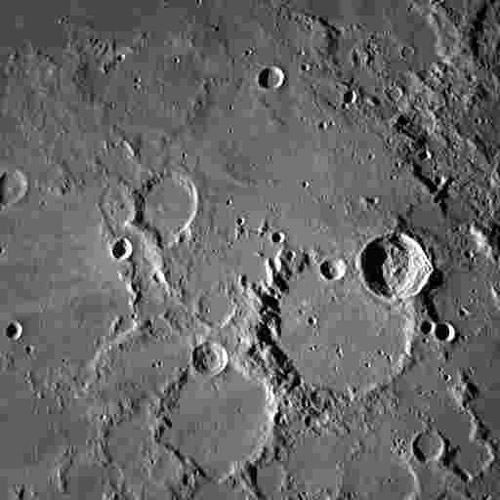
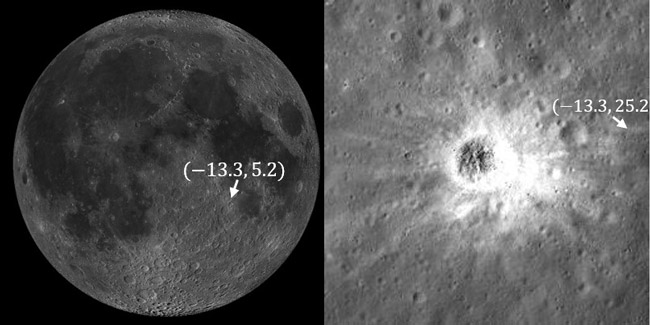
日付が変わる20日午前零時頃、着陸地点上空の高度7キロにさしかかると、垂直に降下を開始。カメラの画像から岩などの障害物を検出して自ら回避するほか、レーダーによる高度や速度の精密計測も活用する。零時20分頃、月面の低緯度の平原「神酒(みき)の海」にある「シオリクレーター」付近の、半径100メートルの円内に着陸する。一連の着陸過程を坂井氏は「新千歳空港の上空を通過し、20分後に甲子園球場の中にピタッと降りることに挑戦する」と例えて説明する。
高速で移動しながら画像照合航法を実現するには、搭載したコンピューターが重要だ。頭脳であるCPU(中央演算処理装置)は、宇宙用だと地上用の100分の1ほどの性能しかないというが、スリムチームは1~2秒の高速で画像処理して位置を特定する仕組みなどを、独自に開発してきた。
着陸の制御は、相模原市にある管制室から指示を出すのではなく、機体が自律して進める。いったん着陸の降下を始めると中止はできず、管制室からは見守ることになる。20日未明にはひとまず着陸の成否が明らかになり、ピンポイント着陸の成否の判定には1カ月ほどかかる見込みだ。
あえて転倒させて「耐転倒性」確保!?
月の探査が進んで科学研究の狙いが高度化し、今後は探査機にとって安全な広い平原ばかりでなく、クレーター近くの傾斜地など、さまざまな地形の場所への着陸が求められていく。また月の極域のごく限られた場所に、将来の資源利用が期待される水の氷があるとの見方もあり、ピンポイント着陸が技術の鍵となるという。
着陸に関し、スリムの独自の足にも注目したい。米アポロ計画の着陸船のような4本足ではなく、短めの5本足が特徴。まず1本の「主脚」で月面に接地し、次に残り4本の足も使って、15度の傾斜地に、上り坂に向かってしがみつくように倒れ込む。スリムチームは「2段階着陸方式」と呼ぶ。

チームは「スリムの規模の機体の場合、主脚で一度接地してから、機体を前方に回転させて静定する2段階着陸方式が耐転倒性に優れる」という。「耐転倒性」とはいうが、あえて転倒させており、いわば「わざとコケる方式」にもみえる。着陸とはこうだという従来の思考にとらわれず、傾斜地に確実に着陸する方法をひねり出した、研究者たちの知恵が結実している。
世界初から半世紀超…いまだ高いハードル
月面に初めて着陸したのは1966年、旧ソ連の「ルナ9号」。米国は4カ月後に続いたほか、アポロ計画で69~72年、有人着陸に6回も成功している。半世紀超を経たが、地球の6分の1というまとまった重力があり、機体の精密制御が求められる月面への緩やかな着陸は依然、ハードルの高い作業だ。
日本は後述する「硬着陸」を除いて、まだ重力が十分ある星への着陸に挑戦していない。探査機「はやぶさ」「はやぶさ2」は物質採取のため小惑星に着地したが、重力は地球のわずか数万~数十万分の1。ゆっくり降下したり、上昇してやり直したりできる。これに対し月や火星などの大きな星は重力も大きく、逆噴射の制御などを誤ると表面に激突するリスクがある。
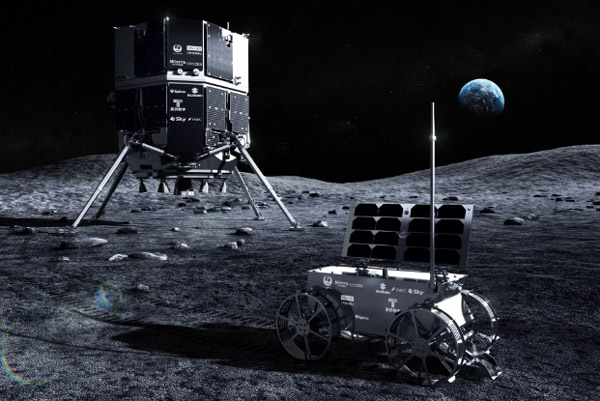
近年は民間による月面着陸の挑戦が目立つが、まだ成功例はない。2007~18年に行われた民間の月面無人探査コンテスト「グーグル・ルナー・Xプライズ」は、勝者なしで終了した。2019年にイスラエルの民間着陸機「べレシート」が、昨年4月にはアイスペース社(東京)の月面探査計画「ハクトR」の着陸機が、それぞれ米国から打ち上げられたが、いずれも月面に激突し失敗。今月8日には米アストロボティック社の「ペレグリン」が打ち上げられたものの、ロケットからの分離後に燃料が漏れるなどし、月面に到達できなくなった。アイスペース社は年内にも、「ハクトRミッション2」の月面着陸機を打ち上げる。
有人着陸では、米航空宇宙局(NASA)がアポロ以来の計画「アルテミス3」について、宇宙船の開発遅れなどを受け、2025年から26年9月へと延期することを、今月9日に発表した。当初は28年の予定だったが、19年にトランプ政権(当時)が前倒しして24年に実現するとし、その後に1年延期となっていたものだ。
ちなみに2022年11月、JAXAの超小型無人機「オモテナシ」が月面を目指して米国から打ち上げられたものの、失敗している。ただし同機が目指したのは衝突ともいえる硬着陸の部類。一般に着陸の言葉が意味する、緩やかな「軟着陸」ではなかった。こうした中でスリムは、打ち上げるロケットも含め、日本の機体で軟着陸する“正真正銘の日本初の挑戦”といえる。
一方、中国は探査技術を急速に高めている。月面着陸は2013年に「嫦娥(じょうが)3号」で実現し、19年に4号が史上初めて月の裏側に降り立った。20年に5号で月の物質を地球に回収したのに続き、世界初となる月の裏側からの回収を目指す6号を、今年前半にも打ち上げる。
カメラと小型ロボットも活躍
スリムの主目的は着陸技術の実証だが、科学観測のための分光カメラも搭載している。着陸後に数日かけ、地下のマントルから月面にむき出しになった「かんらん石」の組成を分析する。かんらん石は、マグマが冷え固まった火成岩に含まれるもの。その組成を調べて地球のマントルのものと比較すれば、月の起源の理解につながる。地球に大きな天体が衝突し、はぎ取られた物質で月ができたとする、有力な「ジャイアントインパクト説」を検証できるという。
アポロなどで地球に持ち帰った試料には、スリムが対象とするかんらん石はないという。また上空からの観測では、かんらん石のある場所までは分かるものの、組成の分析まではできない。地下のかんらん石は、天体の衝突痕であるクレーター付近では月面に掘り起こされているとみられる。ピンポイント技術でこそ着陸できるクレーター付近で、初めてマントル由来のかんらん石の組成を調べ、科学のためのスリムの意義を実証する。
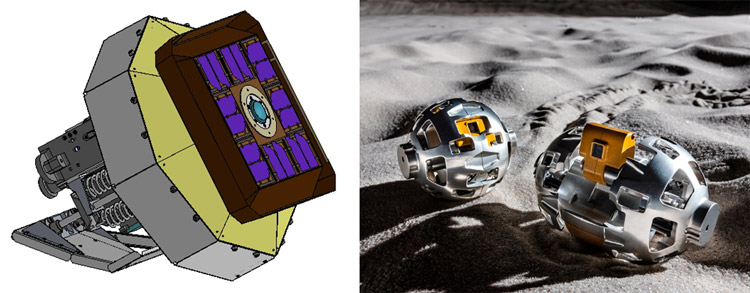
スリムは小型ロボットも載せている。着陸直前の高度2メートルから2体を分離し、スリムが着陸した姿の撮影や状況確認、通信などを目指す。このうち「レブ1」は飛び跳ねるなどして移動するタイプで、JAXAや中央大学、東京農工大学、和歌山大学などが開発。「レブ2」は球形で、着地後に卵が割れるように変形して2輪で走るもので、JAXAとタカラトミー、ソニーグループ、同志社大学が開発した。どちらも、動く姿を想像するだけで楽しい。
検討と開発に20年…思いを込め、20分の一発勝負
日本はこれまで何度も月面軟着陸を検討しながら、実現していなかった。かぐやは、開発初期には着陸機を載せる計画だったが、観測機器を優先するなどのため見送られた。かぐやに続く月探査として2000年頃から検討された着陸機「セレーネB」の構想を源流とし、紆余曲折を経て、コンパクトな機体を実現すべく開発が進んだのがスリムだ。

坂井氏は「20年もかけて検討、開発し、多くの人の思いが小さな機体に詰まっている。宇宙(の探査機など)に特有の話だが、地上で開発し、実際の宇宙環境で試せない一発勝負となる。万全を尽くした。わずか20分で試されるが、クリアして何としてもピンポイント着陸を成功させたい」と話す。
政府がスリム計画にゴーサインを出した2015年には、新聞などが大きく報じて注目された。当時の取材では18年度にも打ち上げる計画だったが、その後、設計の見直しや搭載ロケットの変更の必要に迫られた。また昨年3月の大型ロケット「H3」1号機の失敗の影響も受けてずれ込み、実現までの過程は“スリム”とは言い難いものとなった。
一方この間、米主導の国際協力による大規模な月探査「アルテミス計画」に日本が19年に参加を表明するなどして、月への関心は高まり続けている。日本初の月面着陸という待ち焦がれた一大イベントだが、一時の盛り上がりに終わらず、宇宙科学、宇宙開発の開拓者として歴史に名を刻むよう、スリムに期待している。
関連リンク
- JAXA宇宙科学研究所「SLIM PROJECT」
- JAXA宇宙科学研究所「月周回衛星かぐや」
- アイスペース社「ispace、ミッション2にて月に輸送するマイクロローバーのデザインを発表」
- NASA「NASA Shares Progress Toward Early Artemis Moon Missions with Crew」(アルテミス計画の延期を公表=英文)