

もしもガンダムを作るとしたらいくらくらいかかるか、まじめに計算したことがあります。そうすると、材料費だけで800億円弱かかることがわかりました。これは、つくるための人件費、インフラのお金は含めません。材料費と加工費だけです。
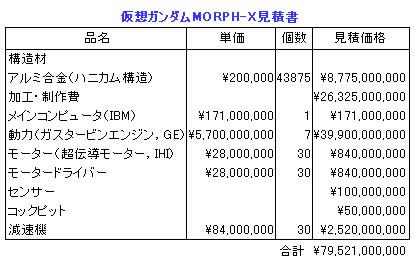
ハニカム構造、蜂の巣構造になったアルミ合金板で、身長18メートルのガンダムをつくると表面積はどれくらいになるかを計算しました。コンピュータシステムやセンサなど、見積をとって構造代はどれくらいか。でもここで計算したガンダムは、ただ歩いたりするだけのものです。
メインコンピュータは、IBMのブルージーンというスーパーコンピュータ利用で1億7,100万円。モーターは400KWの大きなモーターを使い、下半身が12個、胴体に2個、腕が14個、首2個の合計30個を利用します。ちなみに、新幹線が300KW、電動スクーターがだいたい500Wです。このモーターだけで8億円くらい。ここから動力はどれくらいかを計算すると、アパッチという軍用ヘリのエンジンで7機分。アパッチ1機で57億円なので、7機で399億円。それらすべてを合計するとだいたい800億円弱となります。
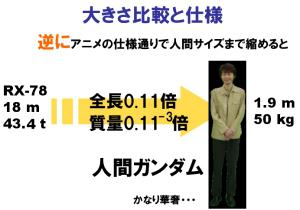
余談ですが、大きさの比較をしてみましょう。ガンダムは身長18メートルで43.4トンの想定です。この身長の10分の1が僕の身長になります。で、僕の体重は57キロ。身長50cmのモルフを18メートルまで大きくすると、体重が432トンくらい。それに比べてガンダムは、18メートルで43.4トンですから軽いんです。これを800億円弱の材料でつくる。歩きますが、空も飛べない。人間も乗れない。しかも二つ問題がある。
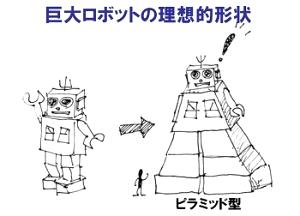
問題その1、質量の問題は大きいです。普通につくるとウン百トンになるはずが、ガンダムはスリムです。足が細い。確かに制御するためには足が細い方がいい。ただ足が細いと、足裏の圧力が高くなります。この体重でかかる圧力では、道路も地面も耐えられない。ズズズッとめり込みます。
身長には体重の限界があります。巨大にしすぎると、足の太いロボットにならざるをえない。時速4キロは人間の早歩きです。走ると時速8キロくらい。足をつく瞬間に自分の体重(質量)の120%〜140%の圧力が地面にかかる。たとえ体重43.4トンでも素早い動きはできないですね。ノッシノッシとしか歩けない。そうなると、巨大ロボットが何の役にたつのかよくわからない。
問題その2、費用対効果。値段の比較をしてみましょう。800億円はどういう評価か。例えば戦車は5億円とか8億円です。航空機は200〜300億円。ロケット打ち上げ費用は101億円。戦闘機2,280億円以上。空母5,130億円。これなどに比べれば巨大ロボットは安い。けれども費用対効果はどうでしょう。
結局、巨大ロボットは、つくっても意味がないという話になります。でも人が乗るという話になると別です。僕は、乗って動くロボットをつくりたいんです。巨大ロボットは、おいておいて。乗れるロボットはこれから必須です。なぜか。ハルキゲニア01もそうなんですが、ロボットのこれからの未来像は、人の不自由を助けるような機械になってほしい。
ここに、ロボットのカテゴリー図があります。
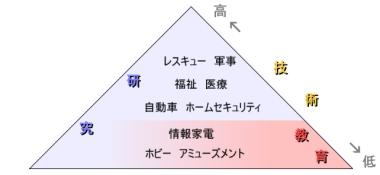
上に行くほど技術が高い。さらに失敗が許されない。家電系では掃除機ロボット。エアコンとか、車のロボット、ホームセキュリティ。防犯ロボット。どんどん上の方向に登って行こうとしている。「安全」かつ「確実」がキーワードです。今は人が人を助けていますが、高齢化社会になると、それができなくなる。その時に家電製品とかだけではなく、ロボットで家電製品を動かすことは大事なことです。自分で何かしたいけど、できない人たちの、「やりたい」という気持ちを物理的な装置に変えるためのロボット。乗って動ける機械になります。
車椅子でも今は行けないところがたくさんあります。バリアフリーというのは、よくよく考えると不自然なんです。簡単な話、車が走れるようにするために道路を鋪装するのと同じで、環境を機械に合わせています。都市部では、頑張ってバリアフリーにすることはある程度できます。でも我々が出かけるところは、人工的な建造物ばかりじゃない。これからは、たとえば車椅子をどこでも行けるような機械にする。環境を機械に合わせるバリアフリーではなく、機械を環境に合わせるんです。
今は技術が高度になってくると、環境を技術にあわせようとする。たとえば高速道路は舗装で自然環境を破壊し、その上を自動車が走っている。でも技術が高度になってくると環境に技術が歩みよる。そんなに道路を鋪装しなくてもいいかもしれない。我々技術者は多分、次の世代によりよい技術を残していきます。ロボットも自然環境に合わせて動けるような乗れるロボット、鋪装しなくてもどこでも行けるような、なおかつ、これからの福祉の分野を考えると「やりたい」という気持ちを物理的な力に変換していく、やりたいという気持ちを具体的な行動に変えていくロボットが出てきます。
人間は人と人とのコミュニケーションで生きています。人がやることを、ロボットがやることではない。まずは介護する人間を助けること、それ以前に動ける人間は自分自身の力で何でもできるようにサポートするのがロボットの役割ではないでしょうか。
実はハルキゲニア01は乗って動けることを目指しています。車輪で行けるところはそのまま進み、行けないところは歩行で乗り越える。ハルキゲニア01は、自然環境を破壊しなくても、どこでも行ける、そんなロボットをつくりたいという思いから生まれています。技術が自然環境を破壊するのではありません。誰かの手を借りることなく、使い手がどこでも行きたいところに行ける。そんな方向に未来のロボットを考えていく。ガンダムをつくることが必要かどうかは別にして、ガンダムをつくる技術は大事なんです。人が乗って動くロボットは、これから必須だと思います。
これは本当は、僕がロボットをやり始めたきっかけでもあります。昔、身体が悪くて車椅子生活だった時に、行けないところが多かった。もともといろんなところに行くのが好きだった。夕日を見るのが好きで、自然が好きだったんです。自分自身の力では行けない人がいる。そういうところをサポートするロボットであってほしいなと思ってました。
僕が車椅子生活だった時、ロボットが好きでしたし、ロボットの世界だったらどこでも行けると考えました。歳をとると身体が不自由になってくる。頭ははっきりしているのに、身体が動かない。そんな時に家族の手を煩わせずに、自分でなんとかしたい。そういうことが自分で出来るようにするのが、本当のロボットだと思っています。
本サイトに掲載されている記事・写真・図表・動画などの無断転載を禁止します。

鈴木一義(すずき かずよし) 氏のプロフィール
専門は科学技術史で、日本における科学、技術の発展過程の状況を調査、研究をしている。特に江戸時代から現代にかけての科学、技術の状況を実証的な見地で、調査、研究をしている。
これまでに、経済産業省「伝統の技研究会」委員、大阪こどもの城、トヨタ産業記念館、江戸東京博物館、その他博物館の構想委員や展示監修委員などを歴任。

古田貴之(ふるた たかゆき) 氏のプロフィール
独立行政法人 科学技術振興機構 北野共生システムプロジェクトのロボット開発グループリーダーとしてヒューマノイドロボットの開発に従事。2003年6月より千葉工業大学 未来ロボット技術研究センター所長。2002年にヒューマノイドロボット「morph3」、2003年に自動車技術とロボット技術を融合させた「ハルキゲニア01」を開発。