

ロボットを開発する上で非常に重要となる「感じて、考えて、動く」という技術。その中でも今回は「動く」というメカニズムについてお話しします。
2足歩行のロボットは2本の足で歩きます。当たり前ですね。しかし、この「歩く」という動作はとても複雑で、大きく分けて3つのポイントがあります。
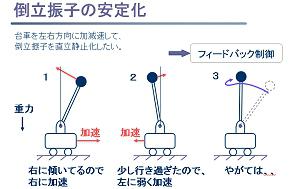
まず、「歩く」というのは倒れこみの連続です。でも、倒れる方向へ倒れ続けていれば、決して倒れることはありません。不思議ですね。物体は重心が高ければ高いほど、倒れ込みがゆっくりになります。逆に小さい場合は、コテンとすぐに倒れる。
ロボットは大きくなればなるほど重心が高くなります。すると、倒れ込みもゆっくりとなり、「はい、足をこういうふうにしましょう、手をこう動かしましょう」という指令を、余裕を持って与えることができます。逆に、ロボットが小さくなればなるほど、簡単に倒れてしまうので、大慌てで手足を動かさないといけない。だから小さいロボットを歩かせることは大変なのです。
ふたつめ。「歩く」というのは足を床に叩きつける運動です。皆さんは階段を降りる時、もう階段がないなと思って足を踏み出したら、じつはまだ段があって、降りた瞬間におなかにグッと衝撃が来た経験はありませんか?
足が着地する瞬間には自分の体重の1.4倍の衝撃が加わります。走ると自分の体重の倍近くの衝撃が加わります。だから、人間は足が着地する時、知らず知らずに衝撃を吸収する動作をしています。おなかにグッときた衝撃がそれに当たります。

巨大ロボットをつくって、歩かせるのは簡単なんです。しかしパイロットは、歩く衝撃に耐えきれずに死んでしまいます。仮にロボットの重さが43トンだった場合、1.8倍の約80トンの衝撃が加わるのです。だから歩く時には、どうやって歩くかということと、着地の瞬間の衝撃をどう吸収するかが大切です。
ポイントの3つ目は、歩くこと、動くこともそうですが、動作を止めることも重要です。野球やテニスで、バットやラケットを素振りしたとき、急にパッと止めると身体が持っていかれますね。これは動く部分が重いほど制御が難しくなります。

世の中、いろんなロボットがありますが、足の細いロボットが数多くあります。足が細いのにはちゃんと理由があります。バットを振るのと同じで、太い足はブンブン足を動かすと、勢いで力を発揮してバランスをとるのが難しくなる。足が細いとほとんど質量がなくて、どんどん動かしても勢いの力が発生しない。足はバランスをとるだけでいいのです。逆に、ロボットの足が大根足になるほど、制御が難しくなっていきます。
morph3は、上半身と下半身を連動させてバランスをとっています。上半身が勢いよく動くと、下半身を小刻みに動かして、上半身の勢いの力を下半身でキャンセルしています。車は急に止まりません。しかし、勢いをキャンセルしておけば、より容易に止めることが可能となる。ニュートンの法則、おそるべしですね。それが動きのツボです。
ロボットの「感じて」という部分は、何を考えるか次第です。簡単な知能のプログラムをつくる時は、とりあえずすべてセンサーから情報を仕入れて、その中から必要な情報を抜き出して判断しようとします。しかし高度なロボットになってくると、感じる部分がたくさんあるために、すべてのセンサーから情報が送られてきても、コンピュータの能力が追いつかずに、処理しきれなくなってくる。つまり、五感を鋭く神経を研ぎ澄ませると疲れてしまうのと同じことですね。
最近の高度なロボットでは、歩く時は足裏の力をセンシティブにして、他の部分は感度を下げていく。知能の考える内容に応じてセンサーのどれを使うか、使わないか、取捨選択する。「考える」と「感じる」をワンセットにしているのです。
たとえばハルキゲニア01は、段差や坂道を車体を平らにしたまま登ります。段差を探すのに、使ってない足ロボットをちょっと上に動かして、コンピュータが触覚の方だけに集中します。「何かあったかな、当たってないかな」と集中して、ものすごい勢いでそれを感じようとします。その感じた情報を他の足ロボット君に伝えます。

ロボット開発をしていると「鉄腕アトムは生きていますか」とか、「ターミネーターみたいにロボットは反乱しますか」とよく聞かれますが、コンピュータというのはオン・オフの固まりです。どのビットをオンにして、どのビットをオフにするかを決めるのが、プログラムです。つまり、現在のコンピュータでは、「考える」ことのできる人工知能を実現することは不可能と言えるでしょう。
さて、現代のいろいろなロボットですが、掃除機ロボットRoombaというものがあります。距離センサで「壁があるな」と壁モードになる。段差がで落ちそうになると「ここに段差があるな」と、いろんなところでセンサを使って部屋の形を認識します。よくできています。今のロボットは得意な長所を組み合わせて、いいとこどりで、何とかしようとしている。
歩く技術では、MITが昔にやったホッピングロボットというものがあります。きゃしゃ足をしています。すでにお話ししたように、理にかなっています。
ほかに、ボストンダイナミックスという会社がアメリカの国防総省の依頼のお金でつくっている軍事用ロボットがあります。倒れる方向に倒れたら倒れないという、まさにそのものの制御がされています。倒れた方向に倒れていく。倒れた足にすぐ前足が出る。
2004年に北九州の企業が発表したレスキューロボット『援竜』があります。ロボットの中に人間が乗りこんで災害救助をする。例えば事故で開かなくなった自動車のドアを壊して開けてくれる。ただし車内から被災者を救助するのは人間なんです。ロボットが直接被災者に触れることはありません。災害救助で被災者を助けるのはロボットではなくて、なぜ人なのか。ロボットには被災者がどのくらいの大きさで、どのような格好で座っている(あるいは寝ている)のかわからない。被災者のどこをどれくらいの力で持ったらいいのかわからない。そうした判断をロボットにさせることはとても難しいんです。
(独)産業技術総合研究所が2003年にプレス発表したモジュール型ロボットは、複数台のロボットが協力して動く。一個一個が磁石のモジュールになっている。磁石でくっついて形態が変ります。災害救助に使えるんじゃないかということでやっているらしい。モジュールロボットは普通のロボットが協力しあっています。一個一個がロボットになっていて合体します。ちなみにハルキゲニア01も群ロボットです。
遊び心から技術が生まれることもありますからね。世界のロボットのポイントは、ロボットの技術がわかっていると「これはこういう技術があるから足が細いんだな、こういう動きなんだな」とよくわかる。技術がわかると、ものを見るのも見方が変わって楽しくなると思います。
本サイトに掲載されている記事・写真・図表・動画などの無断転載を禁止します。

鈴木一義(すずき かずよし) 氏のプロフィール
専門は科学技術史で、日本における科学、技術の発展過程の状況を調査、研究をしている。特に江戸時代から現代にかけての科学、技術の状況を実証的な見地で、調査、研究をしている。
これまでに、経済産業省「伝統の技研究会」委員、大阪こどもの城、トヨタ産業記念館、江戸東京博物館、その他博物館の構想委員や展示監修委員などを歴任。

古田貴之(ふるた たかゆき) 氏のプロフィール
独立行政法人 科学技術振興機構 北野共生システムプロジェクトのロボット開発グループリーダーとしてヒューマノイドロボットの開発に従事。2003年6月より千葉工業大学 未来ロボット技術研究センター所長。2002年にヒューマノイドロボット「morph3」、2003年に自動車技術とロボット技術を融合させた「ハルキゲニア01」を開発。