

今回はロボットの技術についてお話しします。ロボットの技術とは、センサーで感じて、コンピュータのシステムで考え、モーターを動かす。「感じて・考えて・動く」技術です。WINDロボットシステムは、この「感じて・考えて・動く」部分を、体に着たコンピュータシステムでつくってしまおうというものです。
ロボットの用途には、いくつかカテゴリーがあると思います。大事なのは「感じて・考えて・動く」という賢さを、何に使うかということです。
ロボットは工場で動くもの以外にも、ホビー用や家電製品などもあります。ロボットは、人をサポートして、人の不自由を不自由でなく幸せにできるような機械となるべきです。だから、福祉などの領域には欠かせない、福祉用のアプリケーションでもあります。
ただし、ロボットは単体ではだめで、ロボットを動かすための装置も重要です。これらの装置などを全部ひっくるめた『ロボットシステム』がロボットなんです。そして、そのロボットを動かすための装置を、これからつくらないといけません。
将来、身体が不自由になって、手や足や首が動かしにくくなったとき、動く部分だけを使って、車や家電製品やいろいろなものを動かしたい。寝たきりだけど、自分は右腕だけは動く。右腕だけでビデオも炊飯器も家電製品を使える。できれば車も、自分の動く部分だけを使って運転する。

私たちが研究しているWINDロボットシステムは、ロボットを操縦するためのスーツとなり、操縦者の動きを認識してくれます。感じて、考えて、動くのはロボットなんですが、人間の動作やジェスチャーを予めコンピュータに認識させておき、操縦者が手を上げたらそれに対応する動きをする。人間が動いたのを真似するのではありません。操縦者が右腕を上げれば、ロボットは歩き出すというように、ロボットを制御するのです。
WINDロボットシステムは、複数の高性能センサーから送られてくる情報を、背中の中心にある超小型コンピュータで制御しています。。この技術を使ってハルキゲニア01や、morph3をコントロールしています。また、いろんな家電をコントロールすることも可能になります。WINDロボットシステムは、未来のロボットを動かすための装置なんです。
ロボットの技術には、ものをつくる技術と理論の部分の技術があります。「感じて・考えて・動く」知的な機械はすべてロボットだと言いましたが、ロボットはコンピュータとセンサーとモーターの固まりです。電子回路もついています。
では、実際のロボット君の中身はどうなっているか、ちょっと見てみましょう。たとえばmorph3のカバーを開けてみると、中はメカメカしいです。重要なのは腕のカバーをとったところです。なんかモジャモジャっと繊維と一緒に、電子部品が付いた板のようなものが見えます。これがコンピュータ。

morph3が動いている時に手足が光っているのが見えますが、あれはコンピュータの認知センサーです。morph3は全身に13個の小さなコンピュータが、いろんなところにばら撒かれていて、すべてのコンピュータが協力してロボットを動かします。
足にもたくさんのコンピュータが数珠つなぎに入っています。足裏のどのあたりにどんな力がかかっているかを感じないと、うまく歩けません。そのために、1つの脚に力を感じるセンサーが4つ入っています。足裏のどのへんにどんな力がかかっているかを感じて、小さいコンピュータで考え、そして足に組み込まれているモーターを動かして上手に歩きます。
また身体中に、触覚センサーがついています。重要なのは中の制御の仕組みです。morph3の胸には、身体中に入っている13個の小さいコンピュータを制御する親玉コンピュータがいます。人間も小脳、大脳があるようにロボットもコンピュータの親玉がいます。もしその親玉がいなければ、その小さいコンピュータたちが手足を動かしても、バラバラに動いてしまいます。
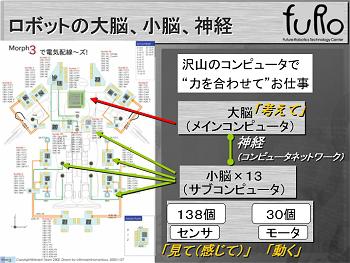
たとえば、「ロボット君、どうやって動いたらいいだろう」と、親玉コンピュータの人工知能が働きます。親玉コンピュータが「どうしたら全身のバランスかとれるんだろう」と、全身のことを考え、それらの情報を受け取った小さい子どものコンピュータたちが、手足を動かします。
ロボットはオーケストラです。胸のコンピュータが指揮者で、手足に入っているコンピュータが、バイオリンやフルートなどの奏者なのです。
本サイトに掲載されている記事・写真・図表・動画などの無断転載を禁止します。

鈴木一義(すずき かずよし) 氏のプロフィール
専門は科学技術史で、日本における科学、技術の発展過程の状況を調査、研究をしている。特に江戸時代から現代にかけての科学、技術の状況を実証的な見地で、調査、研究をしている。
これまでに、経済産業省「伝統の技研究会」委員、大阪こどもの城、トヨタ産業記念館、江戸東京博物館、その他博物館の構想委員や展示監修委員などを歴任。

古田貴之(ふるた たかゆき) 氏のプロフィール
独立行政法人 科学技術振興機構 北野共生システムプロジェクトのロボット開発グループリーダーとしてヒューマノイドロボットの開発に従事。2003年6月より千葉工業大学 未来ロボット技術研究センター所長。2002年にヒューマノイドロボット「morph3」、2003年に自動車技術とロボット技術を融合させた「ハルキゲニア01」を開発。