

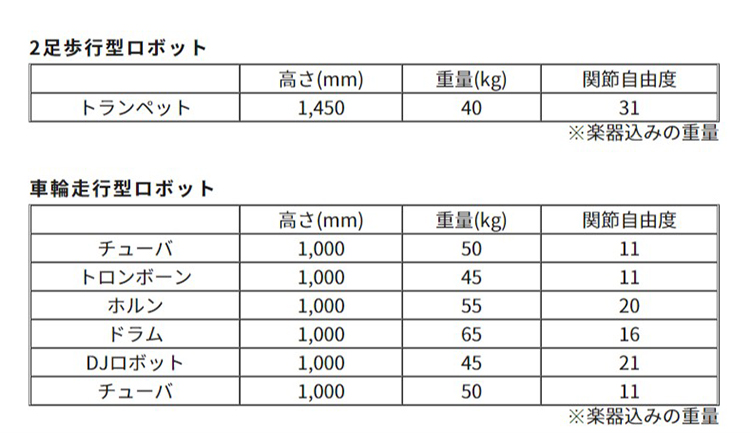
2005年「愛・地球博」において実施したパフォーマンスショーでは、トヨタ・パートナーロボット(楽器演奏回ボット7台、DJロボット1台)によるパフォーマンスが行われた。
楽器演奏ロボットは「道具を使う」という観点から開発が進められているロボットであり、今回のショーでは、人の唇の動きを実現する「人工唇」や手、指の繊細な動き、素早い腕の動作により、トランペットやチューバ、トロンボーン、ホルン、ドラムをエンターテインメント性豊かに演奏するロボットとして登場。
DJロボットは人とのコミュニケーションを目指して開発しているロボットで、今回のショーでは司会者と掛け合いを行うDJ役として登場。
それぞれのロボットはデザインコンセプトとして、日本文化の底流に流れる「和の心」、「もてなしの心」を表現。日本の「面」を思わせる“余韻のある表情"と“きめ細かなつくり"により、親しみと優しさを感じさせるデザインとした。また、最先端技術の採用により、軽量でスリムなボディを実現している。


搭乗歩行型ロボット「i-foot」は、階段の昇降も可能な三次元モビリティを目指して開発している搭乗歩行型ロボット。人が搭乗し、ジョイスティックで操縦できる。


三次元モビィリティの未来への夢と、それを支える安全性、信頼感を、乗員を包み込むシェル型のデザイン「SHELL ON LEGS」で表現。
主な機能として、脚は鳥脚タイプとし、後方に折れ曲がる方式を採用することで、乗降性に配慮。また、従来のモビィリティとは異なる操縦の楽しさを実現するため、ジョイスティックにより、進行方向、歩行速度などをコントロール。
本サイトに掲載されている記事・写真・図表・動画などの無断転載を禁止します。

鈴木一義(すずき かずよし) 氏のプロフィール
専門は科学技術史で、日本における科学、技術の発展過程の状況を調査、研究をしている。特に江戸時代から現代にかけての科学、技術の状況を実証的な見地で、調査、研究をしている。
これまでに、経済産業省「伝統の技研究会」委員、大阪こどもの城、トヨタ産業記念館、江戸東京博物館、その他博物館の構想委員や展示監修委員などを歴任。

古田貴之(ふるた たかゆき) 氏のプロフィール
独立行政法人 科学技術振興機構 北野共生システムプロジェクトのロボット開発グループリーダーとしてヒューマノイドロボットの開発に従事。2003年6月より千葉工業大学 未来ロボット技術研究センター所長。2002年にヒューマノイドロボット「morph3」、2003年に自動車技術とロボット技術を融合させた「ハルキゲニア01」を開発。