ロボットといえば、人間が乗って操縦するもの?ラジコンのように遠くからでも操縦できるもの?それとも、最近お店でよく見かける人型の人工知能(AI)ロボットのようなもの?これらは比較的大きな機械だが、もっと小さな、例えば体の中で活躍して難しい病気の治療ができるような「分子ロボット」をつくる研究も進められている。
北海道大学大学院理学研究院の角五彰(かくご あきら)准教授は、これまでのような機械によるロボットではなく、「化学的な部品(分子)」を組み立てた「分子ロボット」をつくり、生体内での任務を行うことを目指して研究を続けている1人だ。そしてその研究の結果、世界最小の分子ロボットを作ることに成功した。

ロボットの部品
ロボットを動かすためには3つの要素が必要とされている。ロボットの動力となる「駆動系」、命令を与える「知能・制御系」、そして命令のオンとオフを切り替える「センサー」だ。
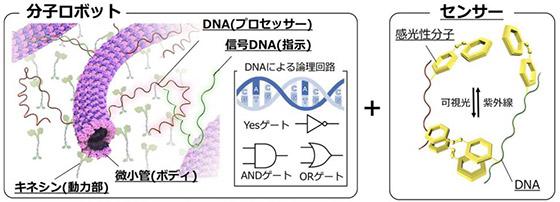
角五さんらがつくった小さな分子ロボットを動かす「駆動系」として働く部品は、私たちの体の中で物質を運ぶ役割をもつ「キネシン」と、キネシンが移動するときの足場となる「微小管」という組み合わせのタンパク質に注目して作られた。
キネシンは「動く」性質をもっており「モータータンパク質」とも呼ばれている。この研究でモータータンパク質が注目された理由は、エネルギー源にある。モータータンパク質は「ATP」という物質をエネルギー源としている。ATPは生物のエネルギー源でもあるため私たちの体の中に豊富に存在している。生体内にある物質をエネルギー源にするのだから、生体内で病気の治療などの任務を行うことを考えたときにエネルギー供給の心配をしなくてもよい。これは大きな利点だ。
初めてつくった「ATPをエネルギー源とする分子ロボット」が動き回る動画を見て「僕にとっては最高の癒し系動画です」と角五さんは笑う。だが、ここに行きつくまでには「学生時代にかじっただけ」というバイオテクノロジーに関する論文や参考書を読みあさりながら、数多くの試行錯誤を重ねたのだという。専門外の知識も学びながら実験を繰り返した日々は苦労の連続だったかもしれないが、その成果は着実に形になってきた。
モータータンパク質に対して「どのように動くか」という指令を伝える「知能・制御系」には、DNAが使われた。ヒントは、ある講演会での現・関西大学化学生命工学部の葛谷明紀(くずや あきのり)教授の講演にあったという。葛谷教授はDNAそのものを合成したり、DNAの振る舞いを制御したりする研究をしている。
DNAは生体内で遺伝情報の保存と伝達を担う物質だ。アデニン、グアニン、シトシン、チミンという4種類の塩基と呼ばれる分子がたくさんつながった鎖が2本1セットとなっている。この2本はそれぞれ「らせん」を描きながら、片方の鎖のアデニンがもう一方の鎖のグアニンと、同じようにシトシンがチミンと結合した「二重らせん構造」で存在している。それぞれの塩基について結合する相手の塩基が決まっているため、2本1セットの構造がほどけて1本ずつばらばらになったとき、1本鎖のDNAは自分とペアの関係にある分子(塩基)を認識する能力をもっている。
角五さんらはその能力を巧みに利用することで、DNAを用いてモータータンパク質に命令を伝えて動きをコントロールすることができるようになったという。
DNAを与えて動きを制御
動くようになると、次の課題が出てきた。「このモータータンパク質にどのようなプログラムを書き込めばいいのか」という課題だ。角五さんはこう思ったという。
「たった数マイクロメートルにすぎないモータータンパク質1つでできた分子ロボットができることはなんだろう。1つだけなんて非力すぎないだろうか」
髪の毛の太さがだいたい50~100マイクロメートル、赤血球の直径が7.5マイクロメートルであることを考えると、確かにモータータンパク質1つからできた分子ロボットはとても頼りなく思える。そんな時にふと、昔から大好きだった自然界に目を向けた。鳥は美しく整った群れをつくることで、はるか遠くの越冬地まで飛んでいく。アリも力を合わせて自分たちよりも大きなものを運んでいくではないか。
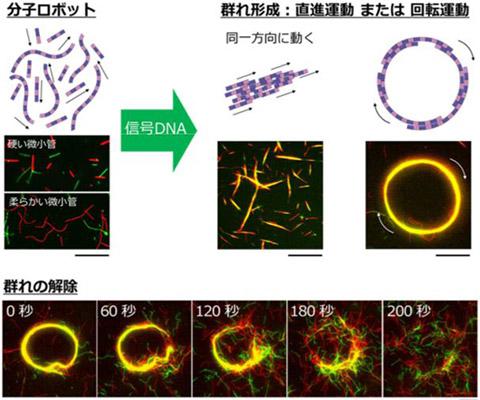
「それならば1つでは小さすぎる分子ロボットも群れることで何か大きなことができるようになるのではないか」。そう考えた角五さんは早速、「群れをつくる・解散する」という命令をもつDNAを与えて動きを制御することにした。この挑戦は成功し、その後の研究によって分子ロボットはもっと複雑な命令にも応じることができるようになったという。例えば、群れをつくって円を描くようにぐるぐる回ることだってできるし、それと同時に辺りを探索する別の群れをつくることもできる。さらに、アリのように群れで大きな物質を運ぶこともできるのだ。
最後の課題は、その命令をコントロールするための「センサー」だ。ここでも、人との出会いによってヒントがもたらされた。
現・名古屋大学生命分子工学専攻の浅沼浩之(あさぬま ひろゆき)教授との研究会での出会いだ。浅沼教授は、光に反応して構造が変わる分子を使ってDNAの二重らせんの形成と解除を制御するなど、光を使って分子の動きを制御する研究をしている。その研究がヒントになった、と角五さん。
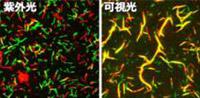
「制御系」のオンとオフを切り替えるために、光を当てることで構造が変わる分子をDNAに組み込むことを考えたのだ。光を当てることによって、組み込んだ分子の形が変わる。この分子の形の変化によって2本鎖のDNAが解けたり元どおりくっついたりすることを利用して、命令のスイッチを切り替えようとしたのだ。そして、人間の目に見える可視光を当てると集合し、人間の目に見えない紫外光を当てると群れが解散する分子ロボットをつくることに成功した。
DNAオリガミが分子ロボットを進化させる
分子ロボットは群れをなすことで大きなことができるようになったが、あまりにも小さいところが弱点だった。「せっかくここまでうまくいったのだから、同じ素材を使ってもう少し構造的にも駆動的にも大きなものが作れないだろうか」。これを課題にして、角五さんは関西大学化学生命工学部の葛谷明紀教授、東京工業大学情報理工学院情報工学系の小長谷明彦(こながや あきひこ)教授らとともに研究を進めてきた。
この研究で角五さんらが目をつけたのが「DNAオリガミ」という構造体だ。オリガミというと、1枚の紙を折って鶴をつくったり、折り紙を組み合わせて手裏剣をつくったりすることが思い浮かぶ。DNAオリガミも似たようなもので、長い1本鎖のDNAを折りたたみ短いDNAを組み合わせて構造を固定することで、より大きな構造体をつくるのだ。
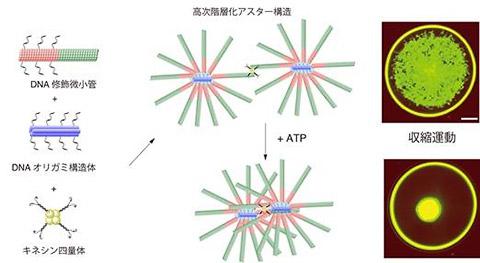
実験で、DNAオリガミ構造体とモータータンパク質が移動するための足場となる微小管に、DNAオリガミ構造体とペアになるDNAをつけた分子を加えた。すると、微小管が放射状に集まって星のように見える構造となった。そこに4つのモータータンパク質(キネシン)を1つにまとめた分子を加えると、星のような構造体が集まり、それまでマイクロメートルサイズの大きさだった網目構造が一気にミリメートルサイズの網目構造にまで大きくなった。
さらにエネルギーの源であるATPを加えた。するとこの構造体は急激に元の大きさの40分の1に収縮した。この収縮運動は人の内臓の筋肉と同じ平滑筋と呼ばれる筋肉と同じような動きなので、この駆動系はまさに「人工分子筋肉」といってよいだろう。
実はこの「人工分子筋肉」の収縮は、DNAオリガミ構造体がなくても観測される。しかし、DNAオリガミ構造体がある方が18倍も早く収縮するという。DNAオリガミの存在は、分子マシンの駆動系の収縮速度に関わるだけでなく、いろいろな構造を作るためにも、もっと複雑な動きを実現するためにも欠かせない存在だ。そのため、分子マシンの今後の発展に大きく関わってくるだろう。
今回、角五准教授らが研究してきた分子ロボットや人工分子筋肉は、生体内にある物質を使ってつくられているため、生体によく適合する必要がある医療用分子ロボットとしての応用が期待される。そう遠くない未来に、小さなロボットが私たちの命を救う日がくるはずだ。
角五さんが、分子ロボットについてのプレゼンテーションでこう語っていたのが強く印象に残っている。
「分子ロボットは1つだけではできることが限られています。でも、1個体ではできなかったことも分子ロボットが群れることによってできるようになります。将来もっといろいろな機能や構造を持った分子ロボットが開発され、集団になれば無限の力が発揮できるかもしれません。私自身についても同じで、1人ではできることが限られています。これらの研究も、たくさんの研究者に助けられて初めてできたことです」
「われわれ人類が直面する課題を少しでもいいから解決したい。力を合わせれば、可能性は無限大です」
たくさんの研究者が協力しあって、無限大の可能性を持つ小さなロボットが研究されている。今後どのように発展して私たちの生活に関わってくるのか、とても楽しみだ。
(サイエンスライター 大谷有史)
関連リンク
- 北海道大学・関西大学・東京工業大学プレスリリース「世界初!DNAオリガミを融合した分子人工筋肉を開発〜ナノからマクロスケールまで広範に適応する再生可能なソフトアクチュエーターとして期待〜(理学研究院准教授 角五彰)」
- 北海道大学・関西大学プレスリリース「特定の信号で自発的に『群れ』をつくる分子ロボットの開発に成功」
