

2016年9月9日(金)、第34回日本ロボット学会学術講演会(RSJ2016)のオープンフォーラムとして、「このロボットがすごい!2016」が山形大学小白川キャンパスで開催された。このフォーラムは、ロボット研究者・開発者が自身の研究・開発内容やその面白さ、ロボットにかける想いなどを一般に向けて語るイベントであり、2015年に続き、2度目の開催となる。
一口に「ロボット」と言っても、その範囲は学問領域としても産業応用としても幅広く、混沌としており、年を追うごとに広がりを見せている。小型ロボットはマイクロ?ナノスケールから分子レベル(10億分の1メートル)にまでそのサイズを落としている一方、宇宙や深海といった人間がこれまで到達不可能だった広範な空間をフィールドとするロボットも開発が進んでいる。生活空間で人間とコミュニケーションを取るロボットが珍しいものではなくなっている一方で、科学技術研究による生物や自然の驚異へのロボットを用いた飽くなき挑戦は終わる気配を見せない。
オーガナイザーである槇田諭(まきた さとし)佐世保工業高等専門学校講師は、このように広範に拡がったロボット分野で、現在どのような研究が行われ、その意義や面白さは何であるかを一般に広く伝え、分野に対する興味を喚起したいと、本フォーラムの目的を述べる。自由に参加が可能なオープンフォーラムとして開催することで、研究者コミュニティだけで完結しがちだった学会を、広く外に開くことを狙っているという。また自身がかつて離島でICTを活用し科学コミュニケーションを行った実感から、聴講を地域格差なく行えるようにと、講演をインターネットを通じたリアルタイムの動画配信やアーカイブ動画で公開している。
本フォーラムには大学や研究機関に所属する研究者のみならず、企業の研究者・技術者や、趣味でロボットを作っている技術者たちも集う。自らの研究・開発内容やロボットにかける想いを熱く語る場であり、今回は9名が登壇した。以下に、各講演者の発表内容の特徴と魅力をご紹介しよう。(なお、講演動画はYouTubeでも公開されている。ぜひ視聴し、それぞれの講演者が放つ熱量を感じてほしい。
アメーバ型分子ロボット「AAA」モーターはタンパク質、回路はDNA! 世界最小「分子ロボ」
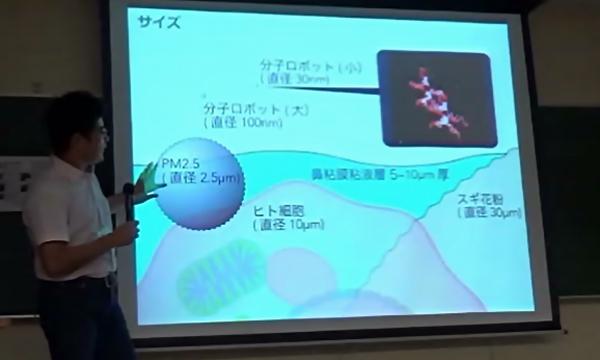
野村 M. 慎一郎(のむら しんいちろう)東北大学大学院工学研究科准教授は、『分子ロボットをつくる』と題した発表を行った。そもそもロボットとは、センサ、アクチュエータ、コントローラからなる構造体であり、外の環境を認識して環境に変化を与える一連の装置がまとまっているものである。野村氏によると現在、これらの各要素を全て分子で構成することが可能で、大きさ30〜100ナノメートル級の分子ロボットが開発されているという。野村氏と佐藤佑介(さとう ゆうすけ)同研究科博士課程後期学生によって、構造やセンサ・アクチュエータだけではなく制御やプログラムも分子で行うことを目的として開発されたのが、アメーバ型分子ロボット『AAA』である。
このロボットは細胞サイズの膜袋(リポソーム)の内部に分子モーターといわれるモータータンパク質を入れ、膜袋と分子モーターの間をDNA回路によって接続したものだ。このDNA回路は制御用DNA分子の入力によって接続のオンとオフを切り替えることができ、モーターの駆動力を膜袋に伝達するか否かを切り替えるクラッチとして機能する。この機能を利用して、分子ロボットの運動制御を行うことができる。DNA回路のデザインによって、外界からの光信号に応じたクラッチの制御もできる。現在は分子ロボットキットとして冷凍されたAAAを研究者向けに提供しており、各研究者がキットを解凍して動きを観察したり、好みの分子をインストールすることができるようになっている。
野村氏は将来の分子ロボットの適用例として、培養細胞の品質管理や生物体内でのその場診断、ペプチド等の物質生産などを挙げた。また 分子ロボットの利点として、機能・構造の全てがデザイン可能であり生物とは違いブラックボックス(解らないまま利用される部分)がないことや勝手に増殖しないこと、倫理面の問題がないこと等を示した。極小の工作物をあやつる分子ロボットの分野へ、ぜひ多くの研究者に参入していただいて可能性を拡げたい、とのことだ。
APC2016 Amazon主催、物流を改革するロボコンへの挑戦
児島諒(こじま りょう)三菱電機研究員は、今年6月30日〜7月3日にドイツにて開催されたAmazon Picking Challenge(APC)2016に、中部大学・中京大学との合同チームで出場した経験を語った。
APCとは、米Amazon社が2015年から開催しているロボットを用いた物流自動化システムの開発コンテストであり、APC2016には、世界から16チームが参加した。競技は、棚の中に収納されている対象物の中から指定されたものを取り出す「Pick task」と、ボックスに入れられた対象物を判別して棚に収納していく「Stow task」の2種目で、制限時間内にどれだけ正確に作業を遂行できるかが評価され、対象物の落下や破損は減点となった。また扱われる対象物は書籍やDVDはもちろん衣類やぬいぐるみ、ダンベルなど形状や重量の異なる全39種で、認識や把持(はじ)が困難なアイテムには加点がされた。
児島氏らのチームは2台のロボットアームを用いて競技に挑んだ。棚から対象物を取り出すPick taskはロボット1台で行ったが、Stow taskでは2台のロボットを使い、ボックスから対象物を取り出して仮置台に置くと同時に対象物の重さを判定して候補を絞る1台と、その情報と3次元ビジョンシステムを用いて仮置台に置かれた対象物の種類を判定し棚に収納する1台を連携させて作業に当てた。2台のロボットの連携を行ったのは全16チーム内でも児島氏のチームだけだったという。
物流現場で扱う数万アイテムをどのようなハンド(手の機能)で把持し、対象物をいかに認識させるか。人間であれば簡単な作業をロボットにどう実現させるかというチャレンジングな課題はまだ数多く残っており、力覚制御や3次元ビジョン認識といったロボットの知能化ソリューションが重要となる。そのためにも、力制御やビジョン認識、ハードウェア等のそれぞれの専門家がいるチーム内のあり方が問われる。児島氏は、「Do everything with a smile」といわれる互いに忌憚のない意見交換ができる関係作りが、技術の進歩には非常に重要であると語った。

ナガレンジャーファイティングフェスタ 過疎地再生のキーとなるロボット開発
開催地である山形県で精密部品の加工製造を営む昌和製作所の小関博資(こせき ひろし)代表取締役社長は、「過疎地こそロボットが必要」と、同県長井市の西置賜産業会を中心としたロボットを用いた地域振興について発表を行った。
この取り組みは、約30年前の1985年に県立長井工業高等学校が始めた、小型の車輪型ロボットが迷路を探索するマイクロマウス競技への参加に端を発する。2年後の87年には同市でマイクロマウス東北大会が開催され、現在も継続している。その一方で同市では、モノづくりの街の技術力を示すアプリケーションとして、2006年から西置賜産業会が小型二足歩行ロボットの製作に取り組んでおり、同年9月には小型二足歩行ロボットのコンテスト「ROBO-ONE」全国大会が開催された。その後も地域の大学生・高校生などを巻き込んでの地域振興や次世代育成が行われ、ROBO-ONE東北大会に位置づけられる「ナガレンジャーファイティングフェスタ」を年2回開催しつづけている。
これらの活動は、地元山形大学の次世代ロボットデザインセンターへの技術協力や、タンザニア・ケニアでの二足歩行ロボット技術披露へと展開した。また、地域と連携したモノづくりの人材育成が評価され、30年前には廃校の危機にあった長井工業高等学校が、第3回ものづくり日本大賞文部科学大臣賞を受賞するまでになった。小関氏は、同市は今後、過疎地域再生のモデル地域となるべく、各種ロボット大会の開催や少年少女ロボットセミナーなどの人材育成を継続していくという考えを示した。
生活支援ロボット「HSR」大手自動車メーカが取り組む、真に役立つ生活支援ロボット開発
寺田耕志(てらだ こうじ)トヨタ自動車株式会社パートナーロボット部主任は、同社が開発する生活支援ロボット「HSR(Human Support Robot)」の現状と、今後の展望を紹介した。
HSRは、手足が不自由な人に対して日常生活の支援を行う介助犬の代替を目的とするロボットだ。一般家庭への導入も視野に入れ、重量34kgと小型軽量で、掃除ロボットRoombaより一回り大きい移動ベース上に作業用のアームが1本取り付けられている。移動ベースとアームの動きをうまく連携させて、床に落ちたものを拾ったり、棚から指定されたものを取り出し運んだりと、自立生活支援に必要なタスクを行う。またロボットに搭載された液晶ディスプレイとマイク・スピーカーを通じて、遠隔地にいる家族がロボットを操縦し、要支援者とコミュニケーションを取るといった遠隔介護支援も担う。今後は部屋の片付けなどの高度な機能の実現を目指すなど、研究を継続していくという。
高度な機能をロボットが自律して行うには、対象物を扱う物体を認識し、自ら行動計画と動作計画を立てるソフトウェアの開発が必要不可欠だ。そのために同社では、ソフトウェア開発や実証実験の推進のため、米国や欧州の関連研究所はもちろん、日本国内の研究機関に10台のHSRを公募で貸し出し、ハードウェアを共有して行う共同開発のネットワークを構築している。寺田氏は、介護施設等での実証実験も準備中で、実環境・実タスクを通じた改善を進め、真に役立つロボットを開発したいとの考えを語った。
HSRは、名古屋で開催される家庭向けサービスロボットの競技会「RoboCup@Home」の2017年大会の標準リーグのプラットフォームに採用されたという。寺田氏はその採用が、家庭用ロボットのソフトウェア資産の蓄積や開発に立ちはだかる参入障壁の緩和につながるだろうと、展望を示した。

サイボーグ型ロボット「HAL(R)」世界初のロボット治療機器開発への模索の日々
装着型ロボット「HAL(R)(Hybrid Assistive Limb(R))」は、昨年11月に厚生労働省の認可が下り、今年4月に日本国内における保険診療が適用された。CYBERDYNEでHALの研究開発を手掛ける研究員の鍋嶌厚太(なべしま こうた)研究員は、自身の学生時代の研究と、CYBERDYNE入社の経緯、HALの今後の展望を語った。
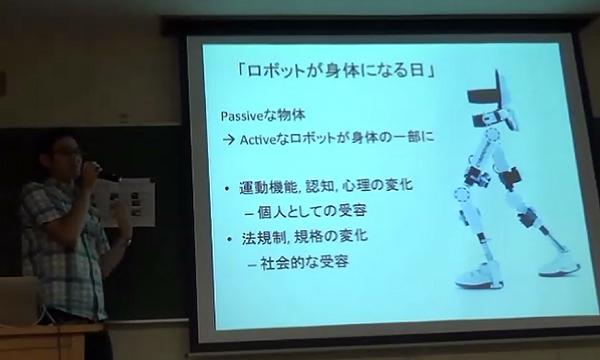
鍋嶌氏は博士課程在籍中、「身体とは何か?」に着目し、手に持った棒や義手などが身体の一部として知覚される現象を、ロボットを用いて検証した。研究を進めるにつれて、ヒトの認知機能の解明と、ロボットの機能向上のための研究開発の間にある乖離に気付いたという。就職活動を始めた2008年、 HALの開発者でもある山海嘉之(さんかい よしゆき)同社長と出会い、HALは、人間が随意的に(意識して)身体を動かす際に発生する生体電位信号によってロボットを制御する「サイバニック随意制御」と、予めインストールされた人間の歩行パターンとその時々の人間の姿勢に基づきロボットを制御する「サイバニック自律制御」の、2つの制御方式のハイブリッドによりコントロールされていることを知った。このハイブリッド型制御方式による随意的に身体を動かした際の自然なフィードバックが、脳や神経系の適応や再学習を促進し、治療効果につながるという山海氏の「iBF仮説」を聞き、社会全体が変容していく可能性に惹かれて入社を決意したそうだ。
しかしそこで待ち受けていたのは既存の機器とは全く違う新たな医療機器開発という先駆者のいない茨の道であり、本当にできるのかという絶望を感じたこともあったが、研究と思考を重ねて開発を行うという山海氏のぶれない方針のもとに腹をくくり、チーム一丸となって開発に勤しんだという。その結果2009年には「HAL福祉用」を、 2013年には「HAL医療用」を発表し、現在は作業支援や自立支援といった分野にも適用範囲を広げている。社内で製造販売を行い、臨床試験、治験という壁を超えて、HALを、国内外で医療機器承認・医療保険の適用を受けた世界初のロボット治療機器に育て上げた。
鍋嶌氏は、これらの承認・評価を得るに従って、学術的な場で研究者たちがHALを見る目が変わってきたのを実感していると言う。講演の最後で、今後はHALだけに留まらず、高齢化社会の進行を背景にサイバニックインタフェースやサイバニックデバイスの商品化を通じて、社会システムやサービスの変革を行うという社の展望を示した。
小型ヒューマノイドロボチーム「CIT Brain」 ロボットでサッカー競技に取り組み続けた10年
入江清(いりえ きよし)千葉工業大学未来ロボット技術研究センター(fuRo)主任研究員は、車輪型移動ロボットの自律走行が主たる研究テーマであるが、その一方で小型ヒューマノイドロボットによるサッカー競技「RoboCup」へ、2007年から毎年参戦している。その長きにわたる挑戦から得られた知見と経験を、「ロボットはサッカーで人間に勝てるか」と題して発表した。
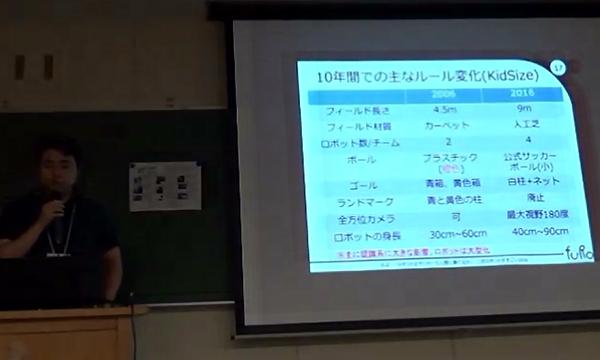
RoboCupヒューマノイドリーグは、小型ヒューマノイドロボットからなるチーム同士が自律でサッカー競技を行うもの。入江氏が参加するチーム「CIT Brain」は、2014〜15年には優勝の栄冠に、また2014年には大会中で最も優秀なロボットに贈られる「ルイ・ヴィトン・ヒューマノイドカップ」を獲得している。入江氏は、その秘訣を「勝つまで続けること」とした上で、2007年の初参加の際に予選落ちとなった悔しさが原動力と述べた。またサッカー競技で勝つためには、戦略計画から知覚認識、身体制御やハードウェアといった、上位層から下位層まで幅広い分野をバランスよくカバーすることが重要であり、CIT Brainのロボットの優位性はそれらの要素のインテグレーション(統合化)にあるとした。
一方で、現状ではあらゆる面で人間の方が優れており、ロボット対ロボットの経験を積み重ねていく必要があること、実際は、戦略以前のハードウェアや制御の段階で試合の大勢が決まるため、そうした下位層から質を確保する重要性を示した。さらに、近年、ディープラーニングの発達を背景として非常に性能の良い画像認識エンジンが発表され、サッカーボールと芝生の区別をかなり精確に行えるようになったが、サッカーボールを「たぬき」と判定するエラーもあり、まだまだ研究開発の余地が十分にあることを示した。
入江氏は、当初「面白い、楽しい」という感覚でRoboCupへ参加していたが、最近は学生など次世代人材育成や研究開発成果の発信、社会的貢献へと参加の原動力がシフトしていると語り、それを自身の10年間の進歩として挙げた。
玉乗りロボット 学生の突飛な発想を経験値で支援する「ロボット開発工学」
熊谷正朗(くまがい まさあき)東北学院大学工学部教授は、玉乗りロボットを形にした自身の研究室の研究開発の手法や研究室運営について紹介した。
熊谷氏の所属する学科では、3年後期の研究室配属の際に、学生自身が行いたい研究をプレゼンし、その内容に基づき配属される研究室や卒業研究のテーマが決まるという。そのため学生は、玉乗りロボットのように、従来の研究や実現可能性にとらわれない自由(無謀)な発想を持って研究室に入ってくる場合がある。熊谷氏にはそのような学生の自由な発想が新鮮であり、10年以上の研究開発経験で築いた技術力をもって自らその実現をサポートする。学生のプレゼンから実現可否を数時間で判断し、具体的な実装方法を検討し、必須となる部品の入手性を確認するという、迅速な判断スキームが必要となる。
玉乗りロボットの場合、それまでに何度も開発経験がある倒立振子がベースとなり、玉を駆動するための全方向移動車輪が必須部品になると判断したという。設計では勘と経験から培われる直感を優先し、必要に応じて数学的手法を用いて直感の裏付けを取り、さらに製作されたロボットの制御(ソフトウェアでメカをどのように動かすか)も、直感と、必要に応じた理論の裏付けによって行っていくという。
これまで数多くの開発経験を重ねてきたことで、学生が提案するアイディアが実現可能かどうかの見極めがしやすくなってきたと熊谷氏は述べ、そのようなロボット開発の方法論を「ロボット開発工学」として体系立てていきたいという。
サイバー救助犬 生物とロボット技術の利点を掛け合わせ被災者探査システム
大野和則(おおの かずのり)東北大学未来科学技術共同研究センター准教授は、災害救助犬にセンサスーツを装着し、生物の能力とロボット技術を融合させる災害時の被災者探査方法「サイバー救助犬」の研究について発表した。
これまで大野氏は、被災地における3次元空間の環境情報収集技術や各種レスキューロボットの開発など、センシングと探査を行うロボットを研究してきた。しかし、レスキューロボットにおいては、環境を認識する能力のみならず被災地において要救助者を発見する能力が必要であり、その能力が不足していたという。一方、東日本大震災の際にも活躍した災害救助犬は、その高い運動能力で瓦礫を走破し、優れた嗅覚を活かして要救助者の発見に貢献した。だが、実際に救助を行う際に必要となる要救助者の健康状態や、人数、周囲の状況などの情報を人間に伝えることは難しく、複数の災害救助犬が同じ被災地で探査に当たる場合、それぞれの犬がどの範囲を探査したかを知り探査漏れがないかを確認することも困難だった。大野氏は、これらの問題を解決し、効果的に要救助者を探査するために、救助犬に装着するセンサスーツを開発した。
センサスーツには映像を記録するカメラと音声を取得するマイク、そして犬の現在位置や運動を取得するためのGPSと慣性センサ(運動の速度や加速度を測るセンサ)が搭載されている。これらのセンサの情報から、救助犬の位置や現在見ている景色はもちろん、救助犬の集中力の度合いや疲労の程度を推定し、救助犬を操るハンドラーに提示できる。開発当初は重量バランスが悪く装着した犬が5分ほどしか歩行できなかったが、現在は大型犬だけではなく中型犬でも装着して十分活動可能な軽量化がなされ、防水や耐衝撃といった耐久性の面でも実用に耐えうるものになったという。また国際消防救助隊・日本救助犬協会との協力により、実験フィールドでの合同訓練も行われている。
発表の最後に大野氏は、これまで自由な発想で実世界で活躍するロボットの研究を行ってきたと自身の研究を振り返り、サイバー救助犬についても実世界で使われるものにしていきたいとの抱負を述べた。

アリ搭乗型ロボット「ANTAM(ANT Activates Machine)」他生物を理解するためのツールとしてのロボット開発
藤澤隆介(ふじさわ りゅうすけ)八戸工業大学講師は、アリなどの生物の協調行動の原理や構造を、ロボットを用いて解明しようとする自身の研究を紹介した。
藤澤氏はまず、生物のコミュニケーション手法は、接触や振動、音といった「機械的手法」から、身振り手振り・発光といった「光学的手法」、匂いや味といった「化学的手法」の3つに大別されるとして、中でも情報の連続性という観点では、化学的手法が非常に優れているとの前提を話した。またそのような化学的コミュニケーションのひとつに、アリの道標フェロモンがあり、そこに着想を得て、実際のアリの代わりに複数の群ロボットを使い、フェロモンの代わりにエタノールを用いて群れ行動を行わせた自らの研究を紹介した。
群ロボットは単体のロボットと比較して、タスクに対する柔軟性や拡張性に優れるが、複数のロボットを協調させて制御することは難しい。フェロモンといった環境を介した化学的コミュニケーションを利用することで、それぞれの個体を制御したり個体同士が情報のやりとりを行うことなく、群れ全体が協調して行動することが可能となる。
またアリ塚を作って環境を自らに適したものへと構築していくシロアリに着想を得て、発泡ウレタンの構造体に移動ロボットを置き、段差を埋めたり水路に橋をかけながら障害物を走破可能にしていくための研究や、アリなどの小型昆虫の移動歩数・距離などの行動計測を長時間かつ自由空間上で行う、アリ搭乗型ロボット「ANTAM(ANT Activates Machine)」についても動画を交えた紹介がなされた。ANTAMは、トレッドミル(健康器具のランニングマシン)のように、アクリル球上で歩行するアリをトラッキングし、アリの移動分だけ球を回転することで全方向における移動補償を行う装置で、その真の目的は、アリが搭乗して操縦する移動ロボットの開発にある。
わずかな衝撃でもアリにとっては運動を阻害する原因となるため、アクリル球への動力伝達部にスポンジを利用したところ、アクリル球とスポンジ間の摩擦で発生する静電気の影響によって、搭乗するアリが吹き飛ばされてしまったといった失敗談を交えつつ、生物を扱うことの難しさと面白さについて進行形の試行錯誤が語られた。

以上9人の発表内容から窺えるように、「ロボット開発」と一言で言っても、その中身はミクロレベルからマクロレベルまで、ソフトウェアやハードウェアから社会的な構造変革まで、さらには実環境での運用から生物原理の解明までと幅広く、かつ混沌としている。そのためロボットの研究開発の深化には、研究者間の情報共有はもちろんのこと、社会に向けた情報発信や対話が必要不可欠となる。そのきっかけとして本フォーラムのような研究者・技術者からの積極的な情報発信が、今後も継続的に行われることが期待される。
(サイエンスライター 瀬戸文美)
関連リンク